捕獸器/RAST/ASIST輔助降落系統
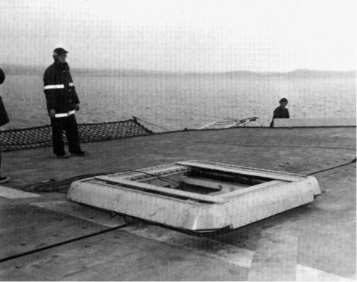
皇家加拿大海軍在聖勞倫特級護航驅逐艦阿西尼比昂號(HMCS Assiniboine DDE 224)
測試補獸器輔助降落系統的照片,配合當時新引進的海王反潛直昇機。攝於1964年。

一架美國海軍SH-60B反潛直昇機正在RAST系統協助下,準備降落一艘史普魯恩斯級驅逐艦甲板上。
注意RAST的輔降鋼纜連結著機腹的探針。RAST是美國版的捕獸器輔降系統。

一架美國海軍SH-60B反潛直昇機在海軍空中作戰中心航空器分部(Naval Air Warfare Center Aircraft Division)的地面設施
進行RAST輔助降落測試。注意到甲板上RSD快速固定裝置中央拉的輔助鋼纜已經與SH-60B機腹的探針連結。

一架美國海軍SH-60B反潛直昇機準備降落在一艘提康德羅加級飛彈巡洋艦甲板上,一個
RAST系統的RSD快速固定裝置已經在著艦區等待甲板上有兩個滑車軌道來讓RSD移動,
RSD將直昇機固定之後就沿著軌道把直昇機拖回機庫。

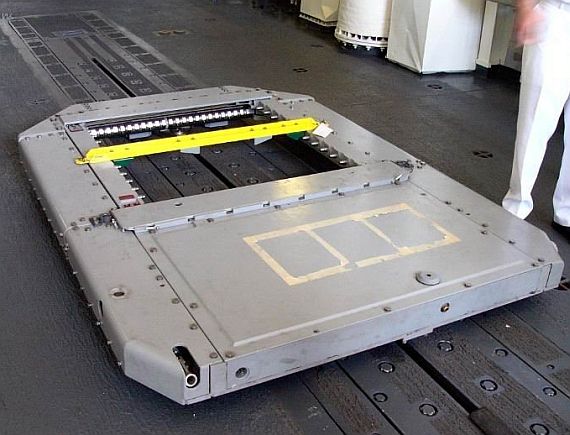
RAST系統的RSD快速鎖定裝置。直昇機降落時,機腹探針必須落在RSD中間的方框結構(捕捉區)里,
然後中間的拘束桿等機械會關閉,緊緊固定住直昇機腹的探針。RSD裝置連結在甲板軌道上,
在艦體因風浪搖晃時,也能安全地將直昇機拖回機庫。

美國海軍柏克級飛彈驅逐艦威廉.勞倫斯號(USS William P. Lawrence DDG-110)直昇機甲板上的RAST系統的
LSO甲板控制室。攝於2019年5月15日新加坡國際防務展(IMDEX 2019)。

RAST的LSO甲板控制室內的操控席。

台灣海軍成功級飛彈巡防艦班超號(PFG-1108)直昇機甲板上的RAST控制室。
攝於2023年3月19日台灣基隆港。

台灣海軍成功級飛彈巡防艦班超號(PFG-1108)的S-70C(M)1反潛直昇機被RAST滑車固定著。
攝於2023年3月19日台灣基隆港。

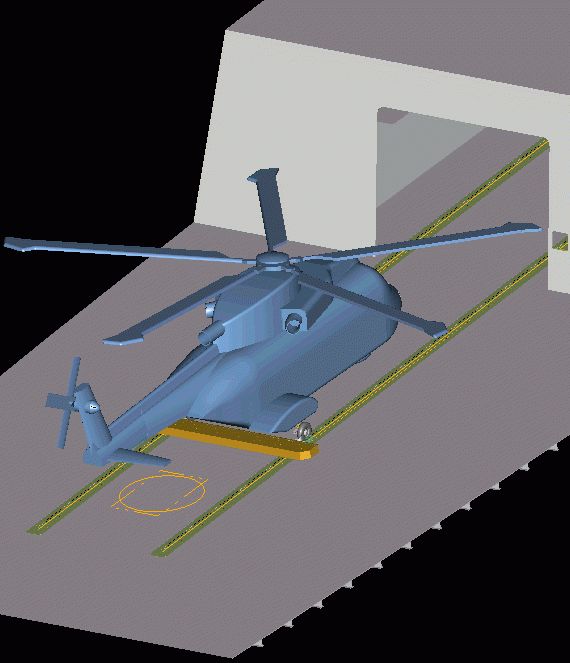
因達科技在2000年代初開發改良自RAST的ASIST輔助降落系統,實現全自動化輔助降落作業,
而且使用更新型的RSD鎖定裝置,直昇機著艦位置的自由度更大。注意到這架直昇機機腹的探針已經與
ASIST的RSD鎖定裝置結合。

新加坡可畏號(RSS Formidable F68)巡防艦使用的ASIST輔助降落系統的滑車,此時正固定住了
甲板上S-70B反潛直昇機的機腹探針。攝於2019年5月15日新加坡國際防務展(IMDEX 2019)

日本海上自衛隊秋月級驅逐艦照月號(DD-116)上的兩套RAST MK.6輔助降落系統,
改使用ASIST系統的 新型RSD固定裝置。攝於2014年6月14日橫須賀。

(上與下) 照月號(DD-116)直昇機甲板上的RAST系統的LSO控制室操作席,攝於2014年6月14日橫須賀。


日本最上級護衛艦熊野號(FFM-2)艦尾起降甲板上的ASIST輔助降落系統。
攝於2023年5月新家坡國際海事防務展(IMDEX 2023)

(上與下)日本最上級護衛艦熊野號(FFM-2)艦尾起降甲板上的RAST MK.6輔助降落系統的滑車。
攝於2023年5月新家坡國際海事防務展(IMDEX 2023)


(上與下)日本最上級護衛艦熊野號(FFM-2)艦尾起降甲板上的RAST MK.6輔助降落系統的控制室。
攝於2023年5月新家坡國際海事防務展(IMDEX 2023)


(上與下)日本最上級護衛艦熊野號(FFM-2)直昇機庫,可以看到機庫頂設有配合直昇機
進場與起降的各種輔助偵測器與指示裝備,包括攝影機等,機庫旁邊還有一個航空管制雷達。
攝於2023年5月新家坡國際海事防務展(IMDEX 2023)


(上與下)日本最上級護衛艦矢矧號(FFM-5)艦尾起降甲板上的RAST MK.6輔助降落系統的滑車,此時正連結
一架SH-60K反潛直昇機的機腹探針。攝於2025年5月7日新家坡國際海事防務展(IMDEX 2025)


意大利保羅.迪雷韋爾級多任務巡防艦的弗朗西斯科.莫羅斯尼號(ITS Francesco Morosini P431)的
艦尾直昇機甲板,注意NH-90直昇機右側、甲板上的橫桿就是TC-ASIST「雙爪」牽引設備的
鉤抓臂,用來鎖定直昇機的後起落架;如此,即便是沒有加裝機腹探針的直昇機也能被TC-ASIST固定
和牽引。 攝於2023年5月新家坡國際海事防務展(IMDEX 2023)

(上與下)意大利FREMM通用型巡防艦Antonio Marceglia (F597)艦尾直昇機起降甲板上,SH-90直昇機左側
就是TC-ASIST「雙爪」牽引設備的勾抓臂,用來鎖定直昇機的後起落架;如此,即便是沒有加裝
機腹探針的直昇機,也能被TC-ASIST固定 和牽引。 攝於2023年5月8日新家坡國際海事防務展(IMDEX 2025)


(上與下)意大利FREMM通用型巡防艦Antonio Marceglia (F597)直昇機起降甲板的TC-ASIST「雙爪」
牽引設備的鉤抓臂。 攝於2023年5月8日新家坡國際海事防務展(IMDEX 2025)。


意大利FREMM通用型巡防艦Antonio Marceglia (F597)的TC-ASIST「雙爪」牽引設備的
其中一個鉤抓臂機構,可以在滑車上左右移動來適應降落的直昇機的起落架寬度。
攝於2023年5月8日新家坡國際海事防務展(IMDEX 2025)。
──by captain Picard
a參考資料:全球防衛雜誌362、363:RAST輔助降落系統的發展(張明德著)
|
「補獸器」輔助降落系統 為了讓直昇機能在驅逐艦等級的中小型水面艦上有效操作,皇家加拿大海軍在1960年代初期開發一種能由中小型船艦搭載的輔助起降系統,由皇家海軍第10實驗中隊(Experimental Squadron 10,VX 10)與達特茅茲(Dartmouth)的費利航空公司(Fairey Aviation)合作開發;此系統正式名稱為直昇機拖降與快速鎖定裝置(Helicopter Hauldown and Rapid Securing Device,HHRSD),又俗稱補獸器(bear trap),以聖勞倫特級(St. Laurent class)護航驅逐艦的阿西尼比昂號(HMCS Assiniboine DDE 224)作為開發系統的測試平台。為此,阿西尼比昂號在1962至1963年的翻修工程中加裝了HHRDS的原型系統,1963年6月28日以直昇機驅逐艦的身份重新服役,隨後並進行 補獸器原型系統和海王直昇機的測試工作。在1963年11月27日,阿西尼比昂號完成第一次海王直昇機的降落作業,一週後進行了第一次在補獸器系統輔助下的降落作業;而加拿大海軍的海王反潛直昇機也是第一種能與 補獸器輔助降落系統配合的直昇機。除了輔降系統之外,為了使直昇機降落作業更安全便利,皇家加拿大海軍還在船艦兩側加裝自動控制的穩定鰭,以減低船體在波浪中的搖晃。
(上與下)皇家加拿大海軍在聖勞倫特級護航驅逐艦阿西尼比昂號(HMCS Assiniboine DDE 224) 測試補獸器輔助降落系統的照片,配合當時新引進的海王反潛直昇機。
補獸器系統在直昇機甲板上設置一個方框形的快速固定裝置(Rapid Securing Device,RSD),在直昇機機腹設置一個可收放的探針;直昇機降落在甲板時讓探針伸入固定裝置的開口,然後將固定裝置關閉夾住探針,如此就能把直昇機牢牢固定在甲板上;由於RSD像是 補獸器一樣要捉住直昇機,因而得名。RSD也是一個軌道滑車,透過鋼纜由絞盤牽引,軌道從直昇機起降區直通機庫,因此直昇機的探針被RSD夾住後,就能由絞盤從甲板拖入機庫,或從機庫拉到甲板起降區域,不需要費力又危險的人工拖纜作業。 由於RSD的面積不大,直昇機很難在船艦搖晃又有風力干擾的情況下精確降到指定位置,因此船艦起降甲板又設置一套連接絞盤的拉降鋼纜(haul-down cable),此鋼纜是從RSD中心拉出;在直昇機降落前,甲板操作人員先拉出拉降鋼纜,先連接直昇機腹的探針裝置, 然後用絞盤將直昇機強行拉降到RSD上,使捕捉裝置能順利固定住機腹探針。
補獸器的快速固定裝置(RSD),這是一個長度約六英尺的方框形滑車, 中間有一對平行的橫桿,當直昇機著艦時機腹伸出的探針會在方框之中, 此時方框中的兩根橫桿往中間移動夾住探針,將直昇機固定。 RSD設置在一個直通機庫的縱向滑軌,透過絞盤牽引, 將直昇機從甲板拉往機庫,或從機庫拉到甲板起降位置。
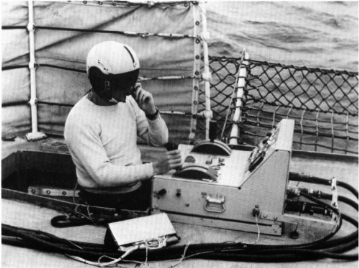
在直昇機起降過程中操作補獸器系統的著艦控制員(Landing Control Officer,LCO) 席位,設置在甲板上。後來的正式系統中,LCO席位就改為一個封閉的位置, LCO透過全景玻璃窗觀看直昇機甲板。
補獸器系統的作業中,甲板人員將海王直昇機機腹垂放的探針與艦上纜繩掛上, 使艦上絞盤能拖帶直昇機著艦。這個連上掛勾的作業對甲板人員仍有潛在危險性。 在補獸器系統的機制下,船艦飛行甲板底下設置快速固定裝置(RSD)以及滑車軌道、牽引鋼纜與雙鼓式絞車,而直昇機上則需設置一個固定勾以及可放下的探針(probe) ;甲板上有一個操作控制台,一位著艦控制員(Landing Control Officer,LCO,爾後加拿大改稱甲板安全官,Landing Safety Officer,LSO)在此控制整個直昇機拉降與固定的程序 。 負責驅動絞車系統的馬達功率60馬力,透過減速齒輪帶動液壓泵浦以及雙鼓式絞車,兩個絞車鼓分別牽引直昇機纜繩與RSD(可以交換工作),每個絞車鼓擁有獨立的離合器(clutch)與煞車系統, 拉降作業時纜繩承受的拉力在3000到4000psi;此外,絞車系統還設有吸收衝擊的緩衝裝置(shock absorber),由一套液壓活塞汽缸構成,鋼纜穿過汽缸兩端,汽缸內充入氣體, 如此絞盤開始進行拉降、纜繩開始承受拉力時,緩衝裝置能緩和鋼纜承受的瞬間拉力,避免施加張力的過程中造成鋼纜負荷過重而損壞。
補獸器系統運作機制如下:直昇機降落前,RSD滑車先移到直昇機起降甲板的降落點,甲板人員將拉降鋼纜從RSD中心拉出約15m的長度,並攤在甲板上。直昇機準備降落時,先在直昇機甲板RSD位置上空6至9m處懸停,駕駛員控制放下一段輕型導引纜;一名甲板地勤人員將直昇機放下的輕型導引纜與艦上拉降鋼纜連結,直昇機駕駛隨即啟動絞盤收回導引纜,導引纜收回時就會將拉降鋼纜帶到機腹固定裝置並穿過探針中心。直昇機與拉降鋼纜連結完畢後,艦上的LCO先通知直昇機駕駛員準備開始拉降,然後就控制絞車捲收拉降鋼纜,將直昇機向下拉;而直昇機在被拉下的同時仍維持發動機輸出來維持向上升力,直到被拉降在甲板上為止,期間飛行員需要將直昇機維持懸停在起降位置上方。LCO會選擇設定拉降過程中的纜繩張力,
並透過一套裝置(包含五個模組)感測纜繩實際承受的張力,隨即調整絞車出力使纜繩張力符合設定值。如果在懸翔過程中直昇機以全功率輸出,就可以在艦尾甲板上空保持高度懸翔(high
hover);準備降落在甲板時,直昇機駕駛降低發動機功率,讓直昇機被緩慢向下拖向起降甲板並達到低懸翔(low
hover)位置,僅僅比起降甲板高一些,並由鋼纜確保直昇機在正確的降落位置,此時LCO會判斷艦體左右搖晃的週期來決定合適的著艦時機;當艦體即將恢復水平時,LCO便立刻通知飛行員降落
(飛行員需降低直昇機發動機出力),並控制絞車捲收鋼纜(此時施加在纜繩的張力為最大的4000psi),將直昇機拉到甲板上著陸。 在補獸器系統的降落作業中,直昇機始終保持發動機全功率輸出,這對於安全性帶來一種顯著的效益:因為氣流從艦首經過艦尾,容易在艦尾甲板區域形成不穩定的沈降氣流,如果此時直昇機為了降落而減少輸出功率,就可能突然被下沈氣流拖下去,導致落海或重落地;而如果能讓直昇機在降落過程中保持向上升力,就能抵抗沈降氣流造成的危險。此外,當艦體在高海象下上下快速起伏搖晃時,直昇機由於可維持正向升力,故能減低降落甲板的衝擊,增加安全性並減少機體和起落架的損耗。 補獸器不僅大幅增加直昇機著艦的安全性,也免除了將直昇機從甲板拖回機庫、或從直昇機庫推至甲板起飛位置等費時費力的人工需求。 不過,補獸器系統仍需要人員進行甲板作業,將懸翔的直昇機垂放的探針掛上船艦上的張力纜繩,這個作業仍存在一定的危險性,尤其是在惡劣海況之下。此外,補獸器系統透過機尾的導引絞車改變直昇機方向來對準機庫,但由於 此時被RSD夾住的機腹探針位置並非直昇機旋轉中心,因此有時不能順利讓直昇機旋轉,不當的操作反而可能使直昇機尾椼或後起落架受力過大而損壞,而不得不解開RSD的鎖定來調整直昇機方向 ;然而在較高海況下,一但解除RSD的固定,就會讓直昇機在甲板上翻覆。 再者,補獸器的拉降作業雖然有前述優點,但配合的直昇機必須有特別強化過的機體結構,以承受拉降過程中拉降鋼纜的拉力(方向與直昇機升力相反)以及較高下降速率,這導致 補獸器系統的機型選擇受到很大的限制;目前能配合補獸器的機型,至少都是9噸級以上的中型直昇機。 補獸器系統另一個明顯的弱點是需要在艦上安裝沈重的鋼纜與絞盤,佔用不少體積且增加額外重量,成本也比較昂貴,只能用於較大型的艦艇。再者,捕獸器系統需要有地勤人員在甲板上工作,負責將船上的拉降鋼纜與直昇機放下的導引纜結合,這代表人員在較惡劣天候與高海況下必須在直昇機甲板工作,安全顧慮較大。 最初加拿大海軍在1964年2月左右宣布補獸器系統發展成功(此時VX10已經在阿西尼比昂號累積了110架次的起降),不過稍後持續的測試又發現纜繩在高張力的情況下容易卡住,遂繼續測試修改,使得海王艦載直昇機進入皇家加拿大海軍艦上服役的時間延後大約兩年。在1966年9月,第一套經過完整改進的 補獸器系統裝備於皇家加拿大海軍安納波里斯級巡防艦(Annapolis class,加拿大第一種在設計中納入直昇機輔助降落系統的艦艇)首艦安納波里斯號(Annapolis DDH-265)。在1967年3月到4月,安納波里斯級巡防艦二號艦尼比崗號(HMCS Nipigon DDH 266)完成補獸器系統的操作驗證,海王艦載直昇機單位隨即在5月首次部署上艦,這是海王反潛直昇機第一次在驅逐艦等級的水面艦艇上進行實戰部署。最初皇家加拿大海軍只讓海王直昇機在日間進行船艦起降操作,隨後等加拿大發展出地平線提示設備來幫助直昇機駕駛於夜間或能見度不良的情況下辨認直昇機姿態,海王直昇機才於1970年達成全天候艦上起降操作能力。
海王反潛直昇機即將降落在加拿大部族級驅逐艦上,注意補獸夾輔助降落 滑車已經就位,而機腹也已經聯上輔降鋼纜。 由於補獸器系統大獲成功,其他西方國家也迅速看上這種能讓四千噸以下艦艇有效操作直昇機的技術,遂紛紛採用此種系統 。第一個引進「補獸器」的是日本海上自衛隊,裝備於1970年代服役的榛名級直昇機驅逐艦上 ,隨後也用於白根級直昇機驅逐艦與初雪級通用驅逐艦。爾後印度海軍也引進兩套捕獸器,裝備於1970年代後期服役的最後兩艘改良型納札里級(Nilgiri class)巡防艦上。日本與印度引進捕獸器輔助降落系統時,搭配的同樣是海王反潛直昇機。 美國版捕獸器系統:RAST
日本海上自衛隊的SH-60J反潛直昇機正在著艦,注意RAST輔降系統的纜繩 已經掛上機腹。纜繩由快速鎖定裝置(RSD)中間的開口拉出,而RSD的軌道 則通向機庫。RAST就是加拿大開發的補獸器系統的美國版本,可以注意 到RAST的RSD滑車外型與原版捕獸器不同。 此照片是一張日本初雪級 驅逐艦,該艦最初配備加拿大原版的捕獸夾輔助降落系統,在著艦區尾端 設有配合海王反潛直昇機機尾探針的柵格;配合SH-60J換裝RAST之後, 就不 再需要柵格,但此時柵格尚未被移除。
美國海軍首先在1967年邀請皇家加拿大海軍派艦艇到美國展示補獸器系統,不過沒有立刻跟進採用;當時美國海軍第一代輕型多用途空載反潛系統(LAMPS 1,使用5噸級的SH-2F海妖直昇機)屬於過渡性系統,用來配合先前操作DASH遙控反潛直昇機的艦艇,考慮到改裝這些現有艦艇的工程量與成本,美國海軍並沒有配合使用任何形式的直昇機輔助降落系統,而且5噸級的SH-2F直昇機的甲板作業尚能由人工負荷。直到1970年代美國發展第三代輕型多用途空載反潛系統(LAMPS 3,使用的直昇機是8、9噸級的SH-60B)時,才終於引進補獸器系統作為配套,稱之為 回收、輔助、固定和移動系統(Recovery Assist, Secure and Traverse,RAST) 。 在加拿大與美國官方的技術轉移工業合作之下,RAST由因達科技公司(Indal Technologies Inc.)生產,前兩套在1979年交付美國海軍,其中一套安裝在新澤西州樹林湖(Lakehurst)的美國海軍航空工程中心進行測試,另一套裝備於第二艘派里級巡防艦麥欽納利號(USS Mclnerney FFG-8)進行艦上測試;美國海軍從1979年開始在航空工程中心進行RAST的陸地起降測試,透過一個精確模擬船艦起降甲板的平台,驗證實際操作過程中RAST各次系統的效能,以及SH-60B在與張力鋼纜連結時的飛行操控品質和降落特性。1981年1月起,SH-60B在麥欽納利號進行RAST起降測試,在為期27日的測試期間進行包括50節甲板風、5級海象、艦體橫搖28度等情況下的著艦測試,證實SH-60B的飛行控制性能完全能滿足RAST懸停作業的需求,能在5級海象(33節最大風速、湧浪高13英尺、艦體6度縱搖與15度橫搖)的情況下確保直昇機安全著艦。隨後,美國所有可以配合SH-60B起降操作的驅逐艦、巡防艦都裝置了RAST,而澳洲、日本 、西班牙等西方國家引進與SH-60B同系列的S-70反潛直昇機時,也配合引進了RAST。因達 公司多年來總共銷售兩百套以上的輔助降落系統給許多國家(其中美國購買了一百多套)。因達公司在2005年3月1日正式被美國柯帝斯.萊特(Curtiss Wright)公司由英國Novar集團手中購併。
上為加拿大原版補獸器系統的RSD快速鎖定裝置,下為美國版RAST的 RSD滑車,足見RAST的RSD外觀比較扁平。
RAST的LSO甲板控制室。
與原版捕獸器相較,美國RAST的基本構造大致相同,都包括裝備於艦艇上的RSD快速鎖定滑車以及配合的絞盤,並在直昇機腹配備一個固定探針;此外,為了配合機體較為低矮的SH-60B,RAST使用的RSD快速鎖定裝置的外觀也比原版捕獸器的更為扁平,稱為低輪廓型(Low
Profile)的RSD。美國只有首艘測試RAST的麥欽納利號在直昇機著艦區後端設置機尾探針柵格,之後美國所有的RAST都取消了這個柵格,這是因為SH-60B的起落架設計已經能提供足夠的穩定性,不需要額外的機尾探針來輔助RSD,這也使SH-60B能以相對於艦艇軸線更大的夾角著陸,增加了直昇機進場作業的彈性。原本捕獸器的鋼纜稱為拉降鋼纜(haul-down
cable),而美國RAST則改稱為回收輔助張力鋼纜(recovery assist tethering
cable)(以下簡稱助降鋼纜);而捕獸器系統的著艦控制員(LCO)也被美國海軍改稱為甲板信號官(Landing Signals
Officer,LSO)。在加拿大捕獸器系統的操作程序中,LCO擁有整個直昇機拉降作業的控制權,包括決定直昇機何時由高度懸翔進入低懸翔、直昇機懸翔的位置以及將直昇機拉降在甲板上的時機,飛行員只需依照LCO的指示保持直昇機懸停並調整位置;而在美國海軍的RAST作業中,直昇機降落的相關判定權限在飛行員手中,包括決定下降速率以及著艦時機。與捕獸器類似,RAST也包括一些設置在艦上的視覺提示裝備來協助飛行員,包括艦首-艦尾軸線燈(up-the
stern approach
orientation,能自動抵銷高海況下艦艇縱搖的影響,指示飛行員正確進場方向)、機庫頂照明燈、設置在機庫頂部與庫門上的懸停指示標示(hover
position cue mark,協助飛行員掌握正確的懸停高度)以及一組地平線參考系統(horizon reference
system,是一組安裝在陀螺儀穩定器上的橫桿,橫桿上設置照明燈,提示飛行員正確的水平姿態,使飛行員在夜間能維持機體姿態與橫向位置,並判斷艦體搖晃週期)等等。
(上與下)SH-60B直昇機進行RAST降落程序,甲板人員先將機腹釋放的引導纜與RSD中央拉出的助降 鋼纜連結。此時直昇機需保持在甲板上方約15英尺的高度懸降,這個作業存在一定的危險性, 尤其是在海況較高、艦體上下顛簸的情況。
依照美國海軍RAST的降落程序,直昇機抵達起降甲版上空時,首先在15英尺的掛勾高度(hook-up
height)懸停,由機腹RAST探針中央放下輕型導纜,甲板人員將RSD中央拉出的助降鋼纜掛在導纜上,機上人員啟動絞車將導纜連同張力鋼纜拉回並與直昇機腹的探針連結;與完成連結後,直昇機飛行員依照當時情況要求艦上LSO調整絞盤出力,調整適當的鋼纜張力(介於850至4000磅,直昇機懸停在甲板上方時一般將張力維持在2000磅)。飛行員目視艦艇甲板搖晃週期決定著艦時機。當艦體搖晃較小時,飛行員下達著艦決心,隨後將直昇機降至甲板上方8英尺的低懸翔(Low
hover height)位置,並透過無線電向LSO發出備便降落(Ready to land)的信息,而LSO則回覆「現在著艦」(Land
Now)的信息,將鋼纜張力調節到最大(4000磅),把直昇機拉降在甲板上。直昇機著陸、機腹探針進入LSD中間開口之後,LSO就關閉RSD中間缺口的約束橫桿。夾住直昇機腹探針;接著甲板人員以機尾引導絞車(Tail
Guide
Winch)調整RSD來改變機體方向來對準機庫,最後由RSD將直昇機牽引入庫。在RAST系統中,LSO依照飛行員指示調整鋼纜絞盤的出力,同時也具備向飛行員建議精確懸停位置的最終權限。一般而言,在海況較高的情況下,RAST直昇降落作業會使直昇機在艦尾上空懸停2分半鐘到3分鐘;萬一突然發生緊急情況(例如突發的強烈橫風或湧浪衝擊艦體造成劇烈晃動),直昇機飛行員也能立刻以開關解開機體與張力鋼纜的連結。 ASIST輔助降落系統
如同前述,捕獸器與RAST最大的問題,在於以鋼纜拉降的作業對於配套直昇機機體設計的要求較為嚴格,大幅限制了配套的機種,此外需要昂貴且龐大沈重的鋼纜絞車系統
,只適合配置於體型較大、價值較高的海軍第一線作戰艦艇;此外,降落作業時結合導引纜與助降鋼纜必須仰賴人員在甲板上作業,在氣候風浪較惡劣時增加了危險性。以上因素嚴重限制了補獸器/RAST這類系統的銷售潛力,例如只能配合一些較小型直昇機的小型艦艇或預算較為有限的海岸防衛隊艦艇都會採用設計簡單得多的魚叉式輔助降落系統(僅靠甲板的柵格結構固定降落的直昇機,不需要鋼纜拉降)。同時,相當數量的艦載直昇機飛行員仍偏好傳統的自由降落,而非被絞盤鋼纜強制拉降。稍後因達科技也進行相關的研究統計,並認為在RAST大部分使用範圍之下,取消拉降系統不會影響使用功能,但對於降低系統體積、重量、空間、成本以及提高可靠度等方面有很大的幫助。
(上與下)因達科技發展的ASIST直昇機輔助降落系統,以自動化引導程序 取代過去的鋼纜拉降,協助直昇機降落在甲板定位。ASIST也換用全新 設計的RSD快速固定裝置牽引滑車,能便利地旋轉直昇機方向並拖帶 入庫,整個作業完全自動化。
針對前述的市場需求,因達科技早在1984年9月就提出一種名為RAST Mk.3的構型,刪除直昇機拉降系統,改由電腦自動計算直昇機與船艦的相對位置和運動來協助飛行員降落,而RSD也完全由電腦控制,最後在1990年代初期 推出了名為航空器船艦整合鎖定與調度系統(Aircraft Ship Integrated Secure and Traverse,ASIST) 的新系統。ASIST以最先進的電腦計算與導航定位科技來取代RAST的絞車與鋼纜,由一套安裝在艦上的直昇機位置感測裝備(Helicopter Position Sensing Equipment,HPSE)來精確探測直昇機的位置,直昇機甲板末端兩側各有一個HPSS光電感測單元(包含攝影機、雷射測距儀等),而直昇機則需要在機體兩側加裝供HPSE精確追蹤的信標陣列(Target Beacon Array)。 當直昇機在直昇機甲板上空懸翔時,ASIST的自動導航系統藉由HPSE保持對直昇機的即時標定,自動導航電腦不斷即時計算直昇機的方位、高度等參數,參照 船艦本身前進以及橫搖、縱搖的,計算出直昇機與船艦的整體相對運動,並透過設置在機庫頂的視覺提示燈號(Visual cues)提示飛行員目前的直昇機位置是否適當。直昇機著艦時,電腦控制的RSD軌道滑車就會自動就位,在直昇機著艦後兩秒鐘之內就可鎖住直昇機腹的探針,然後將其拉回機庫。 ASIST的RSD也改用全新設計,由電腦自動控制,在直昇機著艦過程中能自動移動到直昇機下方,而不像過去由鋼纜強迫將直昇機拉到RSD的位置。舊的RSD的捕捉區域是在方框結構中間,而ASIST的RSD滑車變成長條形,使得捕捉區域面積大增。此外,新的RSD滑車底部設有滾輪,使滑車能夠360度旋轉,能調整直昇機角度、對齊機庫;而原本RAST的RSD滑車本身不具備轉動的功能,還需要透過甲板人員操作機尾的引導絞車系統來調整機體角度(如同前述,此項作業有時不能順利讓機身轉向),ASIST就免除了這項困擾。透過以上設計,ASIST的RSD滑車不僅讓直昇機著艦時的位置自由度大幅增加,而且固定直昇機以及牽引機身入庫等作業都實現自動化,不需要地勤人員協助,有效增加了在較惡劣海況下的操作能力。
ASIST於1992年7月31日完成海上測試(在智利海軍船艦上進行),
至今已有新加坡、智利、土耳其、義大利、德國等國家的海軍以及美國海岸防衛隊採用了ASIST,至今累積訂單達60套以上。 除了艦載端設備減輕之外,ASIST的機載端設備也比RAST簡化不少,只需要機腹探針而省略引導纜和絞盤,重量大幅減輕。例如,對30000磅級直昇機而言,ASIST配套的機腹探針重量低於60磅,對20000磅級直昇機的機腹探針重量則小於40磅;相形之下,先前RAST的機載設備含探針、引導纜與絞盤等,總重為130~170磅。 然而,雖然ASIST使用最先進的科技來擺脫了RAST 沈重的鋼纜與絞盤以及對甲板地勤人員的依賴,但無可避免也犧牲 了若干特點;例如,過去RAST能靠鋼纜將直昇機 向下拉、使直昇機在降落過程中能保持正向升力, 進而抵抗下沈氣流並減緩著艦力量, 這種長處便是「無線」的ASIST所不能企及的。 除了ASIST之外,因達科技也繼續對既有的RAST進行改良。先前設置兩個直昇機庫的艦艇必須分別配備兩套包含RSD滑車、滑軌以及牽引絞車的完整RAST,而且一旦任何一個RSD故障,整套RAST就等於無法運作;而因達科技在2000年代初期推出的延伸型輔助降落系統(Extended-Recovery, Assist, Secure and Traverse,E-RAST)就解決了這些問題。E-RAST改用單一牽引絞車搭配連續迴路纜線(Continuous loop cable)來牽引RSD滑車,RSD滑車底部也改用可迴轉形式的滾輪,這使得同一部滑車能在兩條滑車軌道上運行。滑車軌道由甲板起降點開始分岔為Y型,分別抵達機庫內左右兩側的直昇機停放點。E-RAST的設計則使單一絞盤和RSD滑車能同時用於兩條軌道,雙機庫船艦只需要配備一套RSD滑車與絞盤,節省船艦上可觀的體積與重量。而如果船艦仍然配備兩套RSD滑車,也會因為每部滑車都可在兩條滑軌上自由調度,具備相互備援的能力。E-RAST首先被日本海自2000年代初期服役的高波級驅逐艦(村雨級的改進型)採用。在2000年代後期,因達科技進一步推出RAST MK.6,改用與ASIST相同的新型RSD滑車,省略了機尾的引導絞車系統以及相關的甲板人工作業,直昇機著艦鎖定以後調整方位、拖回機庫等作業只需由LSO一人在控制室裡操作就能完成;而日本海自的秋月級驅逐艦就使用了RAST Mk.6。 TC-ASIST/MAST系統
因達科技的TC-ASIST,RSD設計能直接捕捉直昇機的主起落架車輪, 直昇機不需要加裝機腹探針等設備就可以直接相容操作。
(上與下)因達科技的TC-ASIST在2015年測試的畫面,注意捕捉裝置抓 住了這架NH-90直昇機的兩個後起落架
由於先前RAST/ASIST系列都需要在直昇機腹配合加裝探針 ,而由於一些客戶的直昇機並沒有配合加裝探針,因達科技也提出一種名為「雙爪」(Twin-Claw Aircraft Ship Integrated Secure and Traverse,TC-ASIST)的系統,主要設計與ASIST大致,唯一的區別是採用了不同的RSD設計。過去RAST/ASIST的RSD滑車都是固定住直昇機腹的探針,而TC-ASIST的滑車上設置一對鉤抓臂,在直昇機著艦時扣住主起落架的車輪。如此,即便是沒有配套加裝捕捉探針的直昇機,TC-ASIST都可以在甲板上固定及牽引。這套鉤抓臂平時降下,一旦鉤抓臂的感應裝置感測到直昇機起落架框時就升起,整個鎖定的作業完全自動化 ,能在六級海象以內操作直昇機。由於TC-ASIST的鉤抓臂寬度頗大,因此使用雙軌道設計。意大利海軍水平線驅逐艦、FREMM巡防艦以及保羅.迪雷韋爾級(Paolo Thaon Di Revel class)多任務巡防艦都裝備了TC-ASIST。
因達在2017年1月展出的MAST,是TC-ASIST的緊致輕量化版本。 在2017年1月25日於倫敦舉行的水面船艦展(Surface Warships 2017)中,因達首次公開名為人力航空器牽引調度系統(Manual Aircraft Straighten and Traverse,MAST)的航空器處理系統(Aircraft Handling System,AHS)。MAST以TC-ASIST為基礎開發的緊致輕量化版本,使用類似TC-ASIST的勾抓臂滑車來固定直昇機的起落架,但改用單軌道設計,可以旋轉來牽引直昇機改變方向、對準機庫。MAST也與魚叉之類的柵格式直昇機降落固定系統相容。MAST僅需一名人員操作,穿戴胸包(chest pack)型的可攜行控制單元(Portable Control Unit,PCU),在一旁操控勾滑車牽引直昇機的動作。MAST能在5至6級海象下正常工作。
先前的RAST與ASIST都是船艦設計配套的永久性裝備,而MAST則可輕易安裝在任何船艦平台上。MAST相容於許多輕型與中型艦載直昇機,包含大山貓(Lynx)、海豚(Dauphin)以及NH-90等。
|