Type-471柯林斯級傳統動力攻擊潛艦
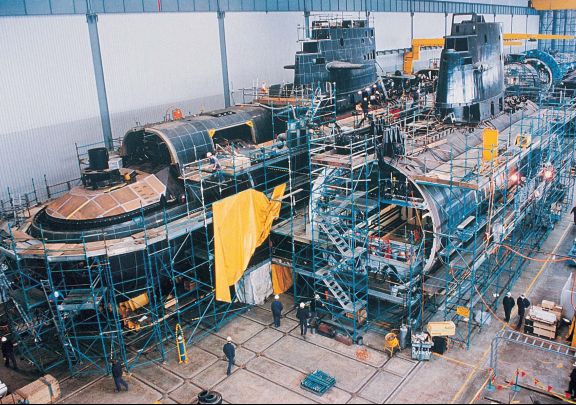
澳洲柯林斯級傳統動力攻擊潛艦由瑞典設計,是一種大型遠洋柴電潛艦。這是柯林斯級完工初期的畫面,
由於面臨包括噪音超標、施工質量、戰鬥系統開發工作失敗等大量問題,柯林斯級在2000年代經過漫長的
改善、重新招標戰鬥系統等工程。早期柯林斯級帆罩前端是平直造型,改良工程後,帆罩前端基部就
增設一個彎角來降低流水阻力。
一艘在南澳澳洲潛艦集團(ASC)造船廠建造中的柯林斯級

柯林斯級首艦柯林斯號(HMAS Collins SSG-73)在1993年8月底舉行下水典禮的畫面。然而實際上,
這個下水典禮只是象徵性的,此時該艦完工程度遠不到正常的下水進度。
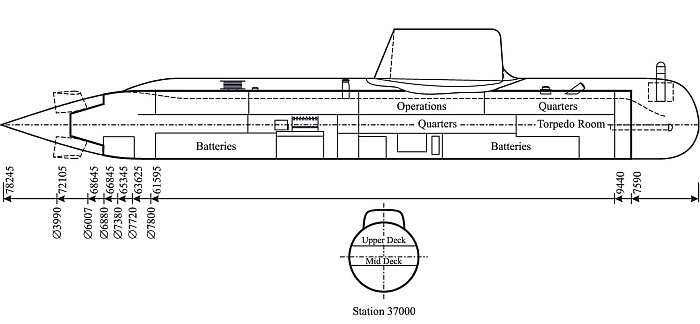
柯林斯級的內部艙室結構簡圖。柯林斯級採用單殼設計。

試航中的柯林斯級瓦勒號(HMAS Waller SSG-75),攝於1999年初。該艦在1999年7月交付澳洲海軍。

柯林斯級的藍金號(HMAS Rankin SSG-78)。帆罩前端的彎角是改進工程時加裝的。

從後方俯瞰兩艘柯林斯級

夕陽下的兩艘柯林斯級

(上與下) 夕陽下的柯林斯級


一艘柯林斯級與皇家澳洲海軍S-70反潛直昇機進行人員吊放作業。

停泊中的藍金號。

一艘柯林斯級潛艦前部,注意艦首的大型聲納音鼓以及兩側的測距聲納單元。

由後方看柯林斯級。

一艘柯林斯級正準備轉進雪梨港的花園島海軍基地。前方是雪梨大橋。

柯林斯級的瓦勒號(HMAS Waller SSG-75)正在通過雪梨港內。前方是雪梨大橋。

一艘柯林斯級在拖船協助下準備停靠碼頭。

浮航中的柯林斯級。

(上與下)三艘進行編隊操演的柯林斯級。


(上與下)三艘柯林斯級並排航行的畫面。


一艘在船廠整修的柯林斯級(右),左為同樣在整修中的阿德萊德級(Adelaide class) 飛彈巡防艦
達爾文號(HMAS Darwin F04)。

一艘柯林斯級架在船台上整修。 注意到除了艦體上部非耐壓結構兩側的三元側面被動測距聲納之外,艦體兩側
還有長條形的大型低頻被動陣列聲納。

一艘柯林斯級近照。注意艦體上部側面的三對測距聲納單元。

兩艘並排停靠的柯林斯級。
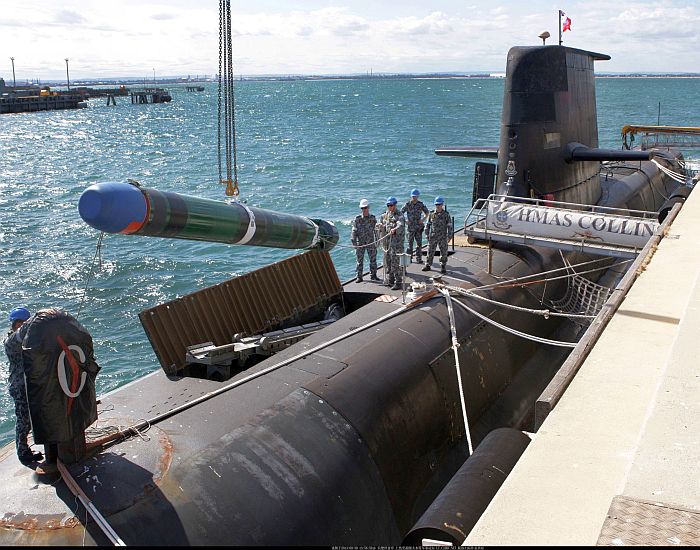
一艘正在裝填魚雷的柯林斯級

柯林斯級尾部特寫,注意X型尾舵以及上方拖曳陣列聲納的施放管。

柯林斯級的控制室與潛望鏡。

(上與下)柯林斯級的顯控台

柯林斯級的電子海圖

柯林斯級的機艙

柯林斯級的地面訓練設施。此為模擬作戰系統。

一艘柯林斯級正被移入浮動乾塢。

兩艘柯林斯級被移到西澳的船塢設施準備進行維修升級,攝於2018年中旬。

一艘柯林斯級架在船廠的大型搬運車上

(上與下)柯林斯級的藍金號(HMAS Rankin SSG-78)與 與美國海軍洛杉磯級核能潛艦阿布奎基
(USS Albuquerque SSN-706)一同演練。攝於2015年上旬。


在2019年2月中旬,澳大利亞海軍派出四艘柯林斯級潛艦柯林斯號(HMAS Collins SSG-73)、
法恩科姆號(HMAS Farncomb SSG-74)、德查紐斯克(HMAS Dechaineux SSG-76)與西恩號(HMAS Sheean SSG-77)
在西澳柯克本灣(Cockburn Sound)水域進行操演。

(上與下)2019年2月中旬,澳大利亞海軍四艘柯林斯級潛艦與美國海軍一艘洛杉磯級核能攻擊潛艦在海上編隊航行。


柯林斯級的西恩號(HMAS Sheean SSG-77)透過美國海軍藍德號(USS Emory S. Land AS-39)潛艦支援艦裝載魚雷。

一架NH-90直昇機正為柯林斯級潛艦進行人員轉移作業。
──by captain Picard
| 艦名/使用國 |
柯林斯級傳統動力攻擊潛艦/澳大利亞
(Type-471 Collins class) | |||
| 承造國/承造廠 | 澳大利亞/ Osborne, ASC ,South Australia | |||
| 尺寸(公尺) | 長77.4 寬7.8 浮航吃水7 | |||
| 排水量(ton) |
浮航3100 潛航3407 | |||
| 動力系統/軸馬力 |
Hedemora/Garden Island Type V18B/14渦輪增壓柴油機*3/6020 Jeumont Schneider 440V直流發電機*3/4200kW(5632馬力) Jeumont Schneider DM-43006推進電動機*1/7344 單軸七葉片螺旋槳 | |||
| 航速(節) |
水面10
水下20以上(電瓶)/24(呼吸管) | |||
| 續航力(海浬) |
浮航:11000/10節
呼吸管航行:9000/10節 潛航480/4節 | |||
| 最大潛深 | 300以上 | |||
| 水面偵測/反制系統 |
Kelvin
Hughes Type-1007平面搜索雷達*1
Argo AR-740電子支援系統 | |||
| 水下偵測/反制系統 |
Thomson Sintra Scylla艦首球型主/被動陣列聲納
Thomson Sintra Namara低頻側面被動陣列聲納 Thomson Marconi Sonar Kariwara或Namara拖曳陣列聲納*1 MOAS水雷/障礙物迴避聲納(2020年代初加裝) HFIA高頻攔截陣列(2020年代初加裝) CK 043搜索潛望鏡*1 CK 093攻擊潛望鏡*1 Strachan & Henshaw SSDE誘餌發射器*2 | |||
| 作戰系統 | Boeing整合式射控系統 | |||
| 乘員 | 42(2009年起增至58人) | |||
| 艦載武裝 | 533mm魚雷發射器*6(管內裝填六枚,艦內可攜帶16枚,使用MK-48 Mod4/7魚雷、魚叉反艦飛彈,或者44枚BAE Systems Stonefish Mk-3水雷) | |||
| 數量 | 共六艘 | |||
| 艦名 | 安放龍骨 | 下水時間 | 交艦時間 | |
|
SSG-73 Collins |
1990/2/14 | 1993/8/28 | 1996/7/27 | |
|
SSG-74 Farncomb |
1991/3/1 | 1995/12/15 | 1998/1/31 | |
|
SSG-75 Waller |
1992/3/19 | 1997/3/14 | 1999/10/7 | |
|
SSG-76 Dechaineux |
1993/3/4 | 1998/3/12 | 2001/2/23 | |
|
SSG-77 Sheean |
1994/2/17 | 1999/5/1 | 2001/2/23 | |
| SSG-78 Rankin | 1995/5/12 | 2001/11/7 | 2003/3/29 | |
(感謝rockitten網友提供資料)
|
起源 為了取代老舊的英製奧克斯利級(Oxley class,即妖王級 ,Oberon class)柴電攻擊潛艦,澳大利亞 早在1978年8月便展開SEA 1114計畫,開始籌畫新一代的潛艦 。澳洲政府在1981至1982年度國防預算中,首度編列關於籌建新潛艦的預算。當時皇家澳洲海軍對新潛艦有幾個主要需求:能滿足澳洲週邊環境的操作需求,配備能滿足壽期生涯任務所需的先進戰鬥系統,能滿足承平時期巡邏嚇阻以及戰時封鎖獵殺的需求,而且澳洲國防工業必須在此案中獲得長期的能力,包括建造工作以及在整個壽期生涯的所有維護與升級作業。 由於皇家澳洲海軍潛艦部隊活動範圍廣闊,一直向西到南中國海、東南亞甚至印度洋,向北達到蘇聯太平洋艦隊的主要基地符拉迪沃斯托克,換言之澳洲潛艦需要航行10000公里才能抵達伏擊作業區,渡航時間極長;因此,澳洲潛艦需要長時間以柴油機狀態高速航行,盡可能縮短從軍渡航航到伏擊區域的時間。基於政治顧慮與成本考量,澳洲政府不願意碰觸核子潛艦,在只能使用傳統動力推進的情況下,澳洲需要堪稱全世界獨一無二的遠洋柴電潛艦,然而歐洲主要柴電潛艦生產國的現有產品多半是中小型近岸防禦潛艦 ,潛艦離港後不需要航行太久就能抵達伏擊作業區,因此這類產品的性能根本無法滿足皇家澳洲海軍的需求。 在1980年代初期,皇家澳洲海軍潛艦專案團隊決定應該依照澳洲的特殊需求重新設計一種潛艦,而非遷就國際市場上現成的貨色,而且必須引進國外廠商技術在澳洲本國建造 ;同時,藉此機會從頭建立澳洲的潛艦生產能量。 由於先前皇家澳洲海軍只有為現役妖王級柴電潛艦進行戰鬥系統升級的經驗,因此最初澳洲國內對於皇家澳洲海軍這項決定頗感疑慮。然而在皇家澳洲海軍的強力遊說之下,加上1980年代首度執政的澳洲工黨(Australian Labor Party,APL) 力主產業轉型,對於透過研製潛艦而帶動澳洲整體產業(包括造船、精密機械與電腦等)升級大力支持,澳洲政府內閣還是在1985年5月9日批准了這個案子,目標放在體型較大、火力較強的柴電潛艦上 ,建造總數為6艘(並考慮後續再追加兩艘)。 評估階段 在1983年初,皇家澳洲海軍總共評估10種國際間現有的潛艦設計。在1983年5月, 皇家澳洲海軍展開了新潛艦的相關研究評估 ,從最初九家納入考量的各國柴電潛艦廠商之中,選擇七家並下達邀標書。到了1983年底,這七家廠商都向澳洲政府回覆了邀標書,包括瑞典Kockums廠提出的Type-471、荷蘭皇家鹿特丹(RDM)的海象級(Walrus)、德國IKL/HDW的Type 209潛艦的放大版、德國泰森北海(TNSW)的TR-1700A、英國維克斯(Vickers)的Type-2400A、法國DCN推出的奧古斯塔級(Agosta)與綠寶石型(Turquoise,紅寶石級核能攻擊潛艦的柴電版)以及義大利 中央海軍船廠(Cantieri Navali Riuniti) 的薩烏羅級(Sauro)的放大改良版。經過評估之後,皇家澳洲海軍對這幾種選項做了一番分析: 1.瑞典Kockums的Type-471潛艦:這是一種全新的潛艦設計方案,基本船型以Kockums廠先前為瑞典海軍建造的A17西哥特蘭級(Vastergotland class)潛艦為基礎,將排水量放大一倍。Type-471擁有許多令皇家澳洲海軍心動的創新技術,包括當時領先全球在潛艦上使用渦輪增壓柴油機、艦首 上部(非耐壓區域)大幅隆起以安裝大型聲納音鼓、自動化程度高(尤其是將全艦所有航行操縱整合在一座全自動化的單人航行控制台) 、設計規格針對較高的作戰強度、在淺海與狹窄海域操作性能絕佳的X型舵面設計等等,而Kockums廠先進的生產管理技術 (包括當時算是尖端前沿的模組化建造以及CAD電腦輔助設計工具)對於當時希望促進產業升級的澳洲政府而言更是一大誘因。然而,Type-471是一種毫無銷售實績的全新產物,若要購買等於是拿自己去當白老鼠,此外瑞典從來沒有轉移技術協助國外建造潛艦的經驗。 2.荷蘭RDM的海象級:純就潛艦設計而言,海象級可能是皇家澳洲海軍最欣賞的提案,因為原始設計就有2300ton的艦體,在所有投標的已驗證設計(有建造實績)中噸位最大、所需要的改動最少且風險最低,淚滴型艦殼提供良好肅靜性與航行性能,無論是操控性、內部空間、航程、武裝等都十分良好,而且已經有現成艦在荷蘭本國服役──獲得本地軍方採用無疑是對軍火廠商的一大背書。 皇家澳洲海軍人員曾參觀過荷蘭海軍的旗魚級(Zwaardvis class)柴電潛艦,也就是海象級的前身,並給予高的評價。然而,海象級較大的人力需求(編制約52人)卻不符合皇家澳洲海軍需求(30人以內);對於人力吃緊的 皇家澳洲海軍而言,降低人員需求一向是購艦的重要考量之一。此外,淚滴型艦殼的施工複雜,成本較高,而荷蘭RDM廠採用的工法與習慣也讓成本進一步攀高。 3.西德IKL/HDW的Type 209放大版,稱為TR-2000,基本上是以印度購買的TR 1500型進一步放大至2000ton。209型是世界上最暢銷的柴電潛艦,而且由於體型較小、自動化程度較高,只需編制31名人員。然而,即便放大後的209型體型仍嫌不足,裝備 皇家澳洲海軍選擇的潛艦作戰與聲納系統後,只能容納四具魚雷發射器,不符合皇家澳洲海軍六具魚雷管的要求。 4.與209型系出同門的西德TNSW的TR-1700A,是阿根廷先前購買的TR-1700的放大版。TR-1700A擁有很高的推力重量比,最大潛航速度25節,號稱全世界速度最快的柴電潛艦,而且自動化程度極高,僅需編制22人。但TR-1700艦體 還是太窄,無法容納 皇家澳洲海軍選擇的作戰與聲納系統,而且所謂25節潛航速率是主電瓶最大輸出、一口氣在十幾分鐘耗盡所有電量才辦得到,幾乎沒有戰術上的實用價值。 5.英國維克斯(Vickers )的Type-2400A是當時該廠為英國海軍新設計的Type-2400(服役後成為擁護者級,Upholder class)的放大版,排水量高達3000ton。Type-2400A的優勢在於配備相當高檔,諸如潛艦隔音瓦、聲納系統、潛航深度都是比照英國的核能攻擊潛艦,動力系統也十分強大;事實上,澳洲潛艦案許多需求與規格就是來自於英國核能攻擊潛艦以及擁護者級。然而,Type-2400的續航性能不佳,就連英國海軍都不是很滿意;此外,維克斯廠的造艦技術較為陳舊,自動化的程度較低,況且英國 對外政策保守,不太願意轉移技術至澳洲船廠建造,提供的工業互惠誘因不高。 6.法國DCN方面,該廠在輸出軍艦並授權轉移技術在客戶的船廠建造擁有豐富的經驗,而法國甚至表示有可能開放出售澳洲原版核子動力的紅寶石級;然而奧古斯塔級原始設計太老舊, 而紅寶石級核能攻擊潛艦由於體積過小而無法容納足夠的減噪設備,導致噪音過大(澳洲甚至認為紅寶石級的噪音比準備淘汰的妖王級潛艦還高)。 7.義大利中央船廠(Cantieri Navali Riuniti )薩改良型烏羅級的問題與奧古斯塔級類似,其原始設計過於老舊(皇家澳洲海軍認為原版薩烏羅級比妖王級還落伍),即便改進後的性能也未知,所以完全不受青睞,廠商未幾便自動退出。 在照初步評估中,澳洲認為IKL/HDW的TR-2000是其中的最佳設計,荷蘭海象級被評定為「合格」(fair),Kockums Type-471與維克斯2400型是「勉強及格」(marginal)。不過,沒有一種設計被認為完全符合皇家澳洲海軍的要求。在接下來,澳洲當局打算選擇其中兩種設計進入第二階段,並由雙方廠商各自依照澳洲的需求進行修改,再提交 皇家澳洲海軍進行評審。 在戰鬥系統部分,澳洲決定將各子系統分開招標。依照澳洲評估,總共有14家各國廠商滿足澳洲潛艦案的研發需求。在1983年1月,澳洲當局總共向其中八家廠商邀標,結果有五家回應,分別是來自美國的洛克威爾國際(Rockwell International)、英國普萊西( Plessey)、荷蘭信號(Signaal)、法國湯松.辛特拉(Thomson Sintra),以及由德國阿特拉斯電子(Atlas Elektronik)與英國佛蘭提(Ferranti)組合的聯盟。 決選 經過第一輪決選,皇家澳洲海軍在1985年5月(比原訂進度落3個月)選出瑞典Kockums的Type-471與德國IKL/HDW放大版209進入第二階段決選 (英國Type-2400與荷蘭海象級雖然性能符合要求,但由於被認定太過昂貴而遭到排除) 。依照皇家澳洲海軍的政策,投標潛艦案的外商必須與澳洲本國企業合資組成聯盟,且澳洲本國企業的持股至少需達50%;因此,IKL/HDW選擇與澳洲海洋系統(Australian Marine Systems,AMS)旗下的Eglo Engineering合作,而Kockums一開始與Eglo Engineering合作,爾後則由芝加哥橋樑鋼鐵(Chicago Bridge & Iron)澳洲分公司、沃瑪國際(Wormald International,)以及澳洲工業發展公司(Australian Industry Development Corporation)組成澳洲潛艦集團(Australian Submarine Corporation Pty Limited,ASC)。在戰鬥系統承 方面,澳洲選定由洛克威爾(Rockwell)以及荷蘭電信(Signnal)進入第二階段。 當時澳洲方面對戰鬥系統的野心很大(1970到1980年代澳洲算是軟體發展的強國),要求採用最先進的分散式架構,如有部分顯控台失效,系統能在不重新啟動的情況下立刻調整,將失效部分的工作立刻轉移到其他顯控台;在當時,洛克威爾的提案就是全分散式系統架構,原本荷蘭信號公司打算用為台灣海龍級潛艦和自用海象級(Walrus class)開發的潛艦戰鬥系統技術,因應皇家澳洲海軍的需求也改提全分散式系統架構。至於西德與英國的廠商手中沒有最先進的柴電潛艦用戰系,西德用於209系列的系統都較為低階而陳舊,英國為自家Type 2400擁護者級柴電潛艦設計的戰鬥系統還在開發中(當時英國潛艦領域都集中在核能潛艦,再前一代的柴電潛艦是1950到60年代服役的妖王級),這些廠商的現有相關產品基礎都不如荷蘭,也不像洛克威爾提出當時最先進的系統架構。而法國廠商的系統則無法與美製武器相容且耗電量較高,且澳洲先前與法國的國防合作經驗並不愉快(例如1970年代轉移技術至澳洲建造成功號補給艦,法國拒絕將相關工程圖與技術文件翻譯成英文,導致澳洲方面成本與時程完全失控)。 在1986年3月,澳洲國防部發佈一份狄比報告(Dibb Report),認為澳洲潛艦計畫由於野心龐大,有成本失控之虞;如果開始出現此一狀況,相關當局應該要縮減潛艦作戰能量來節約開支;在此同時,澳洲聯邦政府財政單位也決定緊縮政府預算。在此情況下,即便是大力支持提升澳洲防衛能力、擴充國防工業的國防部長Kim Beazley,也不得不向潛艦計畫單位提醒,如果澳洲潛艦計畫的成本超過40億澳元(1986年幣值),恐怕難以獲得澳洲內閣的支持。 在1987年5月18日,皇家澳洲海軍正式選擇了瑞典Kockums造船廠的Type-471型的設計,戰鬥系統則由洛克威爾擔任主承包 ;在同年6月3日,澳洲正式與相關廠商簽署設計建造合約,當時總值為38.92億澳幣(1986年幣值) 。在最後評審階段中,澳洲仔細檢視瑞典與德國的設計,結果德國的提案的出海持續操作時間被調降30%,而瑞典Type 471以電池推進的續航時間則被調升15%;這是因為HDW提案的最大續航距離(例如209型系列都宣稱續航力達10000海里)是在全程無戰備的渡航狀態才能達成,作戰相關系統不開機耗電。在審查中,澳洲發現德國HDW提案的充電時間是把所有非必要系統關閉才能達成,而瑞典提出的充電時間則在許多次要系統仍開啟的情況下,意味著德國提案在充電期間無法繼續戰備(或者在戰備情況下需要花費更多時間充電),而瑞典方案就可以。 當時澳洲政府對選擇潛艦的決策過程引發了諸多爭議,有人批評主政的澳洲勞工黨瑞典社會民主黨(Social Democratic Party)都有類似的左傾政治理念,使得潛艦案出現利於瑞典廠商的狀況,而澳洲工黨還有在政治上擺脫英國影響的傾向;此外,英國方面也抱怨,進入第二階段決選的西德與瑞典設計,都不如英國的2400型。 雖然當時瑞典Type-471提案也並沒有完全滿足澳洲方面的需求,但畢竟這是全新的紙面設計,能直接根據皇家澳洲海軍的需求進行變更,而更重要的是瑞典Kockums廠能在此案中提供先進的管理與生產技術,在當時對於追求產業升級的澳洲政府深具吸引力,其他國家的廠商都無法提供如此優越的條件(英國甚至不太願意進行技術轉移)。因此,皇家澳洲海軍決定以Type-471為基礎,參考其他遭到割愛的選項的優點,將尺寸放大到與Type-2400A相似的3000ton規模,參考海象級與TR-1700A的高推重比及平衡設計,以及與Type-2400相似的裝備水平(比照核能攻擊潛艦)。最後,參考各家長處的柯林斯級,各種設計與裝備來源繁複,包括瑞典的艦體設計與動力系統、 德國/澳洲合作生產的蓄電池、英國提供的電子戰系統與光電潛望鏡、法國製造的聲納系統、美國廠商整合的戰鬥系統與魚雷等。 建造 澳洲政府總共採購六艘Type-471,命名為柯林斯級(Collins cclass),並以授權生產方式於澳洲建造。如同前述,瑞典Kockums為了競標柯林斯級潛艦案與 芝加哥橋樑鋼鐵(Chicago Bridge & Iron)澳洲分公司、沃瑪國際(Wormald International)以及澳洲工業發展公司(Australian Industry Development Corporation)組成澳洲潛艦集團(Australian Submarine Corporation Pty Limited,ASC),其中Kockums佔有49%的股份,並在澳洲南部 奧斯本(Osborne)的波特河(Port River) 一塊先前未開發的區域建造了Adelaide造船廠,負責六艘柯林斯級潛艦的建造(首艦的球型聲納等部位由仍Kockums原廠製造);Adelaide造船廠的建造工作在1987年6月29日展開 ,並在1989年11月完工啟用。由於澳洲船廠發現他們原有的機具不適合為潛艦進行加工,為此又向西班牙Bazan廠訂購新的機具。參與此案的國外與本土澳洲廠商達70多家,ASC負責管理1600個獨立的下游承包商(包括1254個本土承包商以及346個海外承包商 );此案除了提供超過兩千個就業機會外,一百多家澳洲廠商也在過程中獲得ISO 9000品管認證。最初澳洲計畫在此案中達成70%的艦體自製率,對於一個從未建造過潛艦的國家而言可謂極具野心,最後實際的自製率高達73.5%,至於艦上戰鬥系統的自製率 (含計畫管理、工程設計、製造與後勤支援)也達到45%。 在1990年代後期,原本合資成立澳洲潛艦集團的 芝加哥橋樑鋼鐵澳洲分公司以及沃瑪國際都出脫ASC的股份給澳洲工業發展公司和Kockums;由於原本Kockums已經持有ASC的49%股票, 為了合乎澳洲本土企業需持有ASC一半以上股票的規定,遂將這些股份又轉手給澳洲本國的James Hardie Industries。在1999年,德國HDW購併Kockums廠,澳洲政府 在2000年4月5日動用優先選擇權,收購原本Kockums手中的所有ASC股權,至此ASC完全成為澳洲國有公司(有趣的是當時澳洲由首相John Howard領導的聯合政府力主國營企業民營化的政策);澳洲政府收購ASC的主因,主要是因為當時柯林斯級已經發生大量問題(見下文), 與Kockums廠產生糾紛,而澳洲要自行改善(如推進器)又牽涉到與Kockums原廠的知識產權糾紛,因此乾脆收購ASC並盡量取得相關的知識產權。在2004年10月1日,完成國有化的澳洲潛艦集團正式改名為ASC Pty Limited,雖然仍保留ASC這個縮寫,但其業務已經開始涵蓋澳洲其他重大海軍軍備案(包括AWD防空驅逐艦)而不僅只有潛艦。
柯林斯號在1990年2月14日舉行安放龍骨儀式的畫面。當時潛艦細部設計尚未完成。
在ASC船廠建造的柯林斯級潛艦分段,左側為艦首分段,右側為艦尾分段。
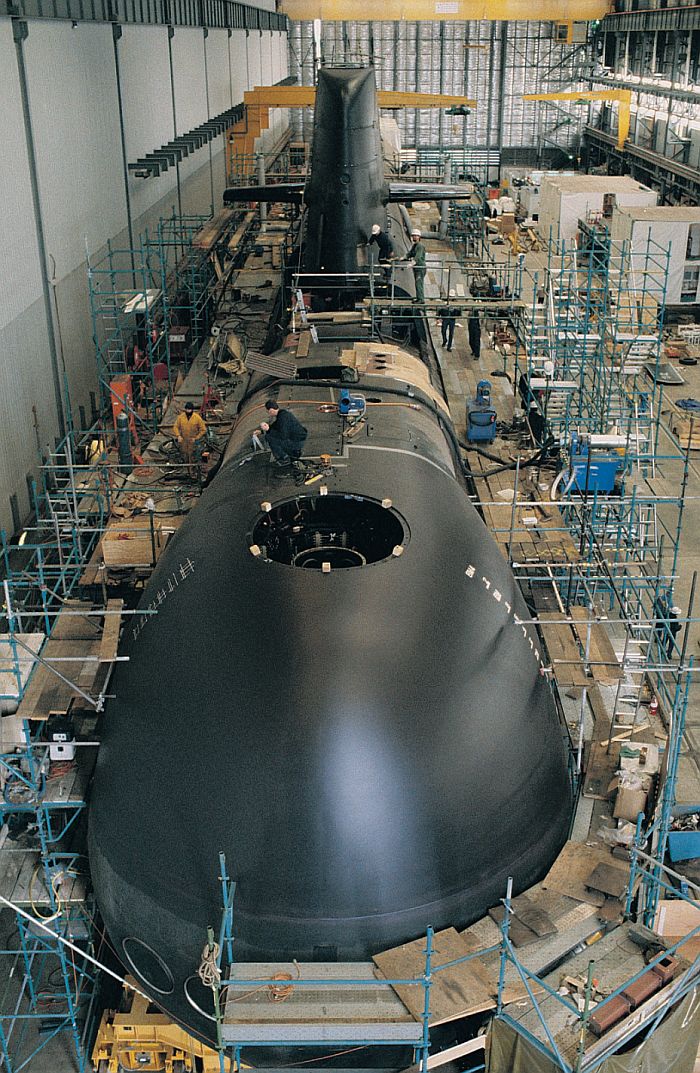
一艘正在ASC奧斯本船廠建造中的柯林斯級分段。此照片清楚顯示柯林斯級的單殼主體結構。
兩艘在ASC船廠建造的柯林斯級潛艦。 首艦柯林斯 號(Collins SSG-73)在1990年2月14日舉行安放龍骨儀式;然而實際上此時潛艦細部設計尚未完成,詳細建造資料如藍圖等還沒產出(只知道耐壓殼直徑等參數),艦內管路設計還沒經過驗證,而且由洛克威爾負責的戰鬥系統也還沒開發完成。柯林斯號原訂在2004年下水,不過實際上提前在1993年8月28日就舉行命名下水儀式;然而在此時,艦上許多重要裝備如內部管路、戰鬥系統等都尚未安裝 ,實質完工進度遠不如一般到達下水階段的潛艦,甚至一部分艦體尚未完工、先使用木材噴上黑漆來遮掩,使潛艦看起來像是已經完工,所以柯林斯號的下水儀式完全只是象徵性的。完成下水儀式後一週之內, 柯林斯號便再度離開水中並回到乾塢,繼續進行其他施工,直到1994年6月才回到水中。 柯林斯號建造時曾發生兩段個船段因尺寸不吻合而無法焊接的情況,不過最後予以解決,不必重造船段。此外,柯林斯號的艦首由瑞典Kockums原廠建造,運抵澳洲後,才發現瑞典使用的焊接技術工法,不符合ASC船廠在合約中規定的安全標準,使得ASC船廠又不得不對艦首進行許多重工。 由於推進系統安裝與戰鬥系統研發進度落後,柯林斯號直到1996年7月27日才舉行成軍典禮,比原訂進度落後18個月;即便如此,由於戰鬥系統的軟體開發遲遲無法完成,柯林斯號直到2000年之前都無法擔負任何戰備任務。後續五艘同型艦原訂以大約每年一艘的間隔陸續成軍,但由於戰鬥系統進度落後,加上柯林斯號在海試階段陸續傳出諸多問題,使得後續艦的施工期程只好延後;以原訂成軍期程計算,後續五艦延誤時間從21個月到41個月不等。到2004年3月之前,全部的柯林斯級都不具備完整的實質戰備能力。 基本設計
柯林斯級的艦首上部明顯隆起,以安裝大型聲納音鼓。 幾十年來,Kockums為瑞典海軍建造的各型柴電潛艦的潛航排水量都在1500ton以下,但是為澳 洲設計的柯林斯級卻一口氣達到3400ton左右的潛航排水量, 是全世界最大型的柴電潛艦之一。柯林斯級也是全世界浮航排水量(3100噸)最大的作戰型柴電潛艦。 柯林斯級的線型與瑞典在1980年代設計建造的A17型西哥特蘭級(Vastergutland class)潛艦有些類似,採用鈍圓艦首、尖錐型尾部,帆罩造型較為流線,前水平舵設置在帆罩上。柯林斯級採用瑞典潛艦慣用的X型尾翼,艦體採用複合式構造,以單殼構造為主體,並沿著壓力殼上部設置一層非水密上部構造 ,而主壓載艙櫃則設置在艦首與艦尾,殼體壽命約30年;耐壓殼內分為上下兩層連續甲板,並由一道中間含有加壓逃生艙口的雙層耐壓艙壁分成前後兩個水密艙區。柯林斯級以瑞典生產的抗拉伸高強度鋼材製造,比HY-80或HY-100更容易加工與焊接,可提高整體性能並降低重量。 如同前述,柯林斯級引進瑞典Kockums提供的CAD電腦輔助設計工具,而當時Kockums使用的是Steerbear CAD/CAM/ CIM,由VAX Server 3600主電腦與多個圖形工作站組成,亦曾被西德等國的造船工業引進。 柯林斯級的自動化程度相當高 ,裝備一套由瑞典SAAB公司研發的監視控制與管理系統(Integrated Submarine Control Monitoring and Management system,ISCMMS),利用各個微處理器來管理艦上每項次系統機能,然後透過資料匯流排與管理系統連接,組成一個全艦監控網路,能對潛艦的推進、電力管理、電能消耗、維生支援、進排水狀況、安全等主要運行機能進行整體的控制與監視,在運作異常時發出警告,同時也具有損害管制以及故障診斷排除等功能。 艦上所有航行操控機能均整合在一個單人顯控台 上,一個人就能操縱,比當時瑞典自用的SCC-200系統還先進。柯林斯級先進的航行控制系統採用類似戰鬥機 線傳控制(Fly by wire)的方式 ,以電腦處理和電子信號控制所有舵面,這是全世界首次在潛艦上使用類似第三代戰鬥機的線傳控制。雖然柯林斯級是艘不折不扣的大型遠洋潛艦,但由於配備機動性高、適合淺海操作的X型舵,使之擁有當時柴電潛艦中最小的迴轉半徑,可在深度、暗礁遍布的東南亞海域與南中國海來去自如。 為了降低磁噪訊,柯林斯級配備Marconi的SDG-1802主動消磁系統。 拜先進科技的引用,柯林斯級的自動化程度較高,全艦原始設計僅需編制36人(稍後增至42人) ,必要時可多攜帶12名人員(學員或特種部隊),反觀先前妖王級則需編制多達65名人員。依照皇家澳洲海軍的原始規劃,最初柯林斯級是依照編制60名人員、可額外容納12名學員的標準來設計 ,後來大幅引用自動化科技來降低人力需求,因此每一名人員都可以有自己的專屬鋪位,使過去潛艦常見的「熱鋪」現象不復存在 ,而柯林斯級的飯廳也足以同時容納全艦所有人員一同用餐,整體適居性良好。不過依照日後柯林斯級的操作經驗,過度精簡人力並非都是好處;澳洲潛艦部隊每趟作戰值勤的航程都相當長(出海航行通常需要十幾天渡航,然後在作戰伏擊區作業約一個月,然後再花十幾天返回澳洲本土基地 ,總航程在70天以上),人力編制越精簡,意味著每個人的工作負荷更重、內容更複雜,在漫長的航程中隨著疲勞累積,就越可能發生人為錯誤或影響人員健康;柯林斯級就曾發生有人員過勞眼花與暈倒的情況 。因此,在2009年起,皇家澳洲海軍將柯林斯級的人力編制增為58人。 從2011年6月起,澳洲開始為柯林斯級規劃女性人員的生活起居,使潛艦能更多地納入女性官兵服役。
柯林斯級採用X型尾舵。架在艦尾上方的管狀物是放拖曳陣列聲納的收放管, 澳洲海軍稱之為「刺針」(Stinger)。 推進系統 推進系統方面,柯林斯級擁有功率強大的組合,包括三具可輸出6020軸馬力的 瑞典Hedemora/Garden Island-Hedemora Type V18B/14 四行程18汽缸渦輪增壓柴油機(後升級為HV V18b/15Ub)、三具功率各1400KW(1877馬力)的Jeumont Schneider 440V直流發電機、四組總重400噸的管狀鉛酸蓄電池,以及一具潛航時使用、可輸出7344軸馬力的Jeumont Schneider雙電樞推進電動機,驅動單軸高曲度七葉片螺旋槳(直徑4.22m)。 其中,瑞典Hedemora Diesel柴油機公司為澳洲柯林斯級潛艦的需求而開發出Type V18B/14 V18柴油機,是第一種用於柴電潛艦的渦輪增壓柴油機;為此,該廠在澳洲雪梨花園島(Garden Island)設立分公司來負責產製這些柴油機。 相較於傳統柴油機,渦輪增壓柴油機在相同體積內能產生更大的功率,因此柯林斯級有更多空間可以容納電池,增加每次充電後的潛航續航力。柯林斯級的鉛酸蓄電池由太平洋海洋電池 (Pacific Marine Batteries)提供,該公司係由德國著名電池廠商Varta與澳洲Pacific Dunlop合資成立;四組蓄電池分兩大組,設置在一個耐壓電池隔艙中。 為了預防主推進系統完全失效,艦上還裝有一個緊急推進馬達(Emergency Propulsion Motor,EPM),由一套MacTaggart Scott DM-43006液壓馬達來驅動一個可伸縮的舷外電動推進器,平時收在艦殼內,使用時伸出艦外,能讓潛艦獲得3到4節的航速。 一般潛航排水量三千噸級以上的柴電潛艦如俄羅斯Kilo 636與日本親潮級,柴油主機總功率都在4000馬力以下,然而柯林斯級的三具柴油機卻擁有高達6000馬力以上的總功率。因此,當柯林斯級以兩部柴油主機以相當於其他型號潛艦總功率來航行時,另外還有一部高功率柴油發電機組專門為電池進行充電,這也成為柯林斯級獨步全球的性能:在呼吸管潛航的狀態下維持20節以上高速的同時, 同時迅速地為電瓶充電。對於渡航時間極長的澳洲潛艦,為了避免浪費太多時間在渡航與充電(其他潛艦柴油機通常沒有足夠功率在全速航行的同時幫主電瓶快速充電),這樣的性能是必須的。 這樣的推進系統讓柯林斯及擁有 在柴電潛艦中最頂尖的戰略機動能力:以呼吸管在水下以柴油機推進(水下航行阻力低於浮航)時,能以24節極速持續二十多小時,非常適合在大洋上 快速運動 ;利用電池推進時,能以400馬力的推進功率持續潛航二十幾小時(由於水下阻力低,此時仍能產生相當的航行速率),平均每潛航24小時只需升起呼吸管為電池充電幾分鐘,即便每次電池耗盡,也只需要1小時就能完成充電(不過一般而言,過於快速的充電速度會導致鉛酸電瓶損耗加劇)。柯林斯級 的水下電動推進器功率亦高達7300馬力以上,在水下用電池推進時,能跑贏路上遇到的所有國家柴電潛艦、大型商船甚至是許多水面艦艇,印度的Kilo 877級潛艦甚至在呼吸管潛航、利用柴油機全力推進時,仍跑不過以電池高速航行的柯林斯級,這刺激印度去升級他們的Kilo型潛艦。柯林斯級的最大潛航速度達21節 以上(呼吸管狀態潛航的實際極速約24節),水面航速為10節,實用潛深300m,最大潛深達590m。在設計上,柯林斯級擁有相當強大的續航力 ,以10節速率浮航時續航力高達11000~11500海里,以10節速率利用呼吸管潛航的續航力為9000海里,以4節速率潛航(使用電瓶)的續航力為480海里,以 電池推進在水下以21節高速衝刺時的續航力約32.6海里,在海上連續操作時間高達70日 。柯林斯級實際上的續航力和自持力超過當時西歐廠商幾種廣為銷售的柴電潛艦,例如柯林斯級在戰備條件下(艦上作戰相關系統保持開機運作)在海中持續操作70天,同時達成9000~10000海里續航力,而當時主流的幾種外銷用柴電潛艦帳面上最大海上持續操作時間與續航距離只能擇一達成,例如最大持續操作時間則是在一出港很快就進入伏擊區坐底備戰、期間只需要上浮充電再下潛、把推進系統耗能降至最低的情況,而德國209型帳面上的10000海里續航力是在全程僅渡航而不戰備(作戰相關系統不開機)的情況下才能達成。 綜合以上,柯林斯級擁有傳統柴電潛艦裡最高 的高速潛航性能與持續潛航能力,甚至擁有「沒有反應器的核能攻擊潛艦」的稱號。 皇家澳洲海軍也曾考慮為柯林斯級追加AIP系統,評估過瑞典Kockums的史特靈發動機以及德國TNSW的CCD封閉循環柴油機等兩種AIP, 甚至曾進行過岸上平台測試,最後認為這兩種AIP的 運作功率都不足,無法提供柯林斯級這種重量級柴電潛艦足夠的推進力與供電;此外,皇家澳洲海軍潛艦經常在水溫超過攝氏30度的印度洋工作,這兩種燃燒式發動機都會出現較高的熱損耗 。柯林斯級除了強大的續航力之外,皇家澳洲海軍設計時也相當重視提高水下潛航的速率,在突破敵方反潛網、搶佔攻擊陣位或躲避敵方追擊時,在水下高速航行的時間能相對較長;而AIP只能提供極低的潛航速率,卻又佔據潛艦相當的體積空間,而且為柯林斯級改裝AIP的經費仍然十分昂貴,估計將超過1億澳幣。 根據柯林斯級的操作測試經驗,在每天24小時的巡航之中,只有數分鐘需要使用呼吸管充電,就能為電池充上接下來一整天所需的電量,被發現的機率微乎其微,因此再增加AIP的效益並不高。基於上述成本效益考量,澳洲 在1996年7月正式取消加裝AIP的計畫。 聲納/感測系統 柯林斯級採用Thomson Sintra的Scylla整合聲納系統,以Thales TSM 2233為基礎發展而來,堪稱當時全球最先進的聲納系統之一。這套先進完善的聲納系統包含一套艦首圓柱型主/被動陣列聲納、位於艦體兩舷的Namara低頻側面被動陣列聲納 (由Thomson Sintra提供,具有監聽、測距與攔截功能)、由Thomson Marconi Sonar的Kariwara或Namara低頻拖曳陣列聲納 、位於帆罩頂端前部的高頻主動避雷防碰聲納、位於艦首上部的攔截測距聲納、分佈於艦體上部構造兩側的三元式被動測距聲納陣列、位於艦體兩側的長條形低頻被動陣列聲納、位於帆罩中部兩側的水下通信收發陣列等,此外艦體兩側從頭到尾還佈置多個監視潛艦自噪的監聽基陣。側面陣列聲納採用壓電聚合物(PVDF)聽音單元,相較於傳統壓電陶瓷組件不僅更輕,而且信噪比(探測靈敏度)更高 Scylla整合聲納系統以兩組計算機為基礎,並由一套通用的軟體與硬體構成,能以不同方式進行系統重組,整套系統的水聲部分包括8個換能器陣列和10個信號處理機櫃。此聲納系統擁有最先進的信號計算處理能力,不僅偵測距離長,且具備特定波束成形、脈衝抑制、抗干擾、識別目標真偽、自動偵測追蹤等先進技術。此聲納系統的功能功包括:全方位被動監視(包含對特定目標的自動追蹤 )、精確定位(包含方位、距離、速度和航向等參數)、對目標進行半自動分類並整理其特徵、針對目標信號進行頻譜分析和參數鑒定、針對敵方聲納與武器的信號實施先期警告、利用各方面聲學趕測與目標追蹤來進行整體戰場態勢評估、實施水下通信,以及發動攻擊前的精確標定等等。這套聲納系統有自適應技術,能自動對潛艦本身的噪音進行監控,除了可調整聲納工作狀態來避免自噪干擾之外,還能檢視艦艇運作狀況;這套聲納系統還有自我測試與故障診斷功能。 艦上的低頻被動陣列聲納 是柯林斯級最顯著的特色,此種長基陣低頻陣列聲納一向只有英、美、蘇聯核能潛艦或者大型反潛艦艇才裝備,用於柴電潛艦則堪稱開創先河。這套拖曳聲納的聽音陣列長度達1000m,直徑僅4.5cm;聽音陣列纜線由六層外皮包覆,最外層是聚氨基甲酸(乙)樹脂套管,其內是依序是編織聚炳烯、凝膠充填物,網狀聚丙烯導體層、凱夫拉增強纖維軟芯等,最裡面才是聽音器單元與搭配的電子傳輸/處理組件,這樣的構造使聽音器獲得良好保護,整條陣列也很容易捲繞,利於收放;施放出去後,聽音陣列大致為零浮力狀態,在水中保持恆定的部署深度。此拖曳聲納基陣很長,遠離潛艦本身的噪音源,接收孔徑大,能測量低頻音源(10kHZ)的距離,採用先進的piezo-electric polyvinyl difluoride技術,在條件適當的深洋中,偵測距離可達500~1000km,並有效偵測靜音化潛艦或魚雷的極低頻聲噪。這套拖曳陣列聲納的收放系統由英國MacTaggartScott公司設計,將相關設施如收納陣列的捲盤、收放絞車、直線牽引單元等機構設置在艦尾上部非耐壓船殼內,拖曳陣列的收放管架在艦尾,通過兩片上尾舵面之間,澳洲海軍人員稱之為「刺針」(Stinger)。 前兩艘柯林斯級(SSG-73、74)裝備Thales Karriwarra製造的拖曳陣列,而後續四艘則裝備Thales Karriwarra或Thales Namara的陣列。 柯林斯級的CK 043搜索潛望鏡與CH 093攻擊潛望鏡由英國Pilkington Optronics(後來成為Thales Optronics)提供,整合有低光度電視攝影機與紅外線熱影像儀等光電裝備,功能相當先進。艦上其他偵測/反制裝備尚包括Argo AR-740電子支援系統(頻帶在2~18GHZ)、Kelvin Hughes Type-1007平面搜索雷達以及兩具Strachan & Henshaw SSDE誘餌發射器 ;為了確保電磁隱密性,艦上還配備英國Marconi的SDG-1802主動電磁屏閉系統,在電磁靜默狀態下只允許接收來自Link-11資料鏈的信號。 在2006年10月,皇家澳洲海軍與法國Sagem Défense Sécurité簽約,為柯林斯級提供SIGMA 40XP慣性導航系統。 作戰射控/武器系統 如同前述,澳洲對柯林斯級戰鬥系統具有極高的野心。在原始計畫中,柯林斯級的戰鬥系統由美國 洛克威爾(後被波音購併)擔任主承包商,由洛克威爾的電腦與監控組件、Librascope(1992年被Loral Space & Communications購併,1996年又再被洛克西德.馬丁合併)的射控/顯示系統以及顯控台、ASC的戰術軟體以及Thomson Sintra(現為Thales Underwater Systems)的聲納系統;這套戰鬥系統採用全分散式架構,系統所需的軟體由美國計算機科學協會(Computer Sciences Corporation,CSC)的澳洲分部負責(又稱澳洲計算機科學公司,Computer Sciences of Australia),以美國軍規ADA程式語言撰寫。Librascop先前在澳洲妖王型潛艦SWUP升級計畫中提供SFCS MK1潛艦射控系統,而為柯林斯級提供的射控系統應該以該公司進一步發展的SFCS MK2為基礎。此外,澳洲計算機科學公司還負責設計相關的岸上訓練設施。
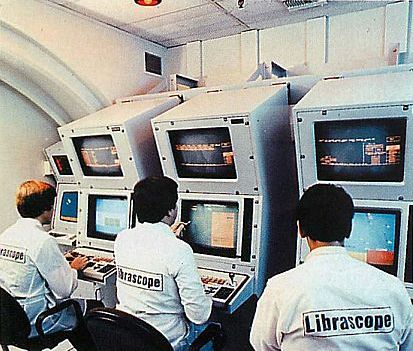
柯林斯級最初戰鬥系統的承包商──洛克威爾團隊的Librascop公司自行開發的SFCS MK2潛艦射控系統,是先前該公司用於升級澳洲妖王型妖王型潛艦SWUP升級計畫中SFCS MK1的改良型。
柯林斯級作戰控制室的畫面 柯林斯級這套戰鬥系統在開發當時,擁有堪稱全世界最高的整合程度,高於當時美國海軍最新型的潛艦戰鬥系統。這套戰鬥系統的主要機能分為兩大部分,第一是監測戰場環境,包括對目標實施探測、識別分類與追蹤,為此戰鬥系統結合了艦上所有的水面/水下感測器並進行自動的資料整合處理,最後生成一個完整的戰場態勢圖像;第二個主要機能是戰場態勢分析和戰術判斷,包括對各目標的威脅評估、潛艦本身的戰術運動分析、最佳戰術機動建議、對高威脅目標自動分配所需的最適當武器,以及進入攻擊階段的自動化武器發射控制(包含武器備便、資料輸入、發射與導控等)。此外,這套戰鬥系統也整合了導航系統。這套戰鬥系統的能量要求是同時追蹤1000 個目標,對其中200個目標實施自動化的動態解算(TMA),再對其中25 個以上的目標進行射控等級的高精確度追蹤定位,並同時接戰六個最具威脅的目標。這套戰鬥系統擁有7個多功能通用顯控臺與一個綜合指揮圖像顯控台,控制室左右兩側各設一個武器資料數據轉換器。硬體方面,這套分散式戰鬥系統採用基於Motorola MC68020處理器的標準化架構,任何子系統都依照此單一介面標準來連接,並用光纖區域網路連線,構成一個遍布全艦的系統網路,聲納信號的傳輸速率達100Mbps;此種系統架構易於管理、維修拆換以及未來新系統的增添。 柯林斯級的通信傳輸包括Link-11資料鏈,不過只有資料接收功能。 柯林斯級較大的艦體使其能容納較多的武器,艦首配備六具533mm魚雷管,除了預先裝填在魚雷管的六件武器之外,艦上魚雷艙共可儲存16枚 美製MK-48 Mod4魚雷/魚叉反艦飛彈或者44枚水雷,使用彈種包括MK-48 Mod4魚雷、魚叉反艦飛彈或BAE的石魚(Stonefish)MK-3水雷。柯林斯級的魚雷管採用渦輪氣壓幫浦(Air Turbine Pump,ATP)發射系統,由一組高壓氣體驅動的渦輪泵浦,抽取艇外海水注入發射管,發射時則將魚雷管內海水加壓,將武器打出去。
柯林斯級裝載美製MK-48魚雷的畫面
柯林斯級的西恩號(HMAS Sheean SSG-77)透過美國海軍藍德號 (USS Emory S. Land AS-39)潛艦支援艦裝載魚雷。
服役初期的缺失 雖然柯林斯級計畫的目標是建造一種世界第一流的傳統動力攻擊潛艦, 然而戰鬥系統的開發延誤已經為此一專案蒙上陰影;當首艦柯林斯號展開海試之後,諸多問題一個接著一個浮現,使整個專案面臨沈重的打擊。 柯林斯級問題叢生的主因,在於其載台與裝備都是全新的,先前毫無使用與測試的實績。 先前皇家澳洲海軍因為柯林斯級陸續完工,不等其達到完全戰備服役的水準,一度貿然決定讓舊有的妖王級潛艦除役,差點讓皇家澳洲海軍在一段時間內沒有可用的潛艦兵力。 1.推進系統方面 推進系統方面,柯林斯級在海試階段,就發現艦上15個燃料箱的相關設計有問題,導致發動機容易產生故障。這幾個燃料箱具有海水補償配重功能,當燃料用罄時,能用來注入海水 維持艦體平衡 ,許多柴電潛艦都有類似功能;然而,柯林斯級不良的 海水管路設計以及操作疏失,導致海水容易藉此在油路中流通並進入發動機 。柯林斯級的海水補償油箱設計沿襲自A17西哥特藍級潛艦,其海水補償設計較為簡單,燃油/海水壓載艙並沒有設置通海閥門;此種設計在瑞典周邊封閉寧靜的淺海沒有問題 ,而且瑞典海軍的潛艦離開港口很快就能進入伏擊作業區,使用柴油機的渡航時間不長。然而,澳洲周邊海域開闊且海況較高,潛艦顛簸更劇烈,加上澳洲海軍潛艦渡航時間長,直接引進空油箱的海水更容易與燃料 充分混合,導致較多的海水進入發動機。原本潛艦柴油機就應該能容忍 少量的海水混入燃油中,然而柯林斯級由於前述燃料艙設計問題導致混入的海水比例過高,加上柴油機的耐海水設計不良,海水混入的柴油時運作狀況明顯下滑,燃燒效率 與輸出功率降低,而噪音與廢氣增加。此外,將海水引入空油箱之後,也容易造成細菌污染、零件生鏽腐蝕以及阻塞等問題。這個問題最後靠著加裝接合器、改進訓練與操作程序、在油料中添加藥劑來殺死外來生物等方式解決。 不過由於過多海水混入燃料以及發動機較不能容忍海水的問題無法根治(除非更換發動機),柯林斯級的油箱必須保持至少30%以上的柴油來維持主機正常運轉,這使得柯林斯級能實際上只能使用70%的燃料, 實際續航力達不到10000海里。 此外,柯林斯級的大軸軸封也被發現密合不良,原始設計雖然容許每小時10公升海水的滲漏,然而試航階段發現進水量高達每小時數百公升,在深潛測試中更達到每小時1000公升的滲水量,對潛艦安全構成潛在危害 ;柯林斯級在大潛深測試時,甚至曾發生每分鐘超過260公升的紀錄,必須立刻上浮。大軸軸封滲漏的問題,除了建造階段施工不良、沒有良好對齊之外,一部份原因是艦體線型不良、產生紊流進入螺旋槳而引發螺旋槳振動、增加機械損耗(見下文)。ASC宣稱軸封問題可透過人工調整等方式予以解決,然而這並非治本之道,導致艦上必須專門指派人員來監視艦尾進水情況,大幅增加了組員的整體工作負荷。 皇家澳洲海軍在操作時發現,如果發生滲漏加劇的情況,可以透過逆轉大軸100圈的方式 ,暫時讓軸封回到定位。然而,由於原本製造軸封的承包商倒閉,而ASC船廠則拒絕為這個問題負責,因此前幾年無法根本解決軸封漏水的問題;爾後澳洲當局找到新的承包商,在1996年底為兩艘柯林斯級的軸封實施修改工程,才終於較好地解決了問題。而從1997年底開始,六艘柯林斯級開始陸續換裝新設計的軸封。 在服役初期,柯林斯級的螺旋槳推進器就已經出現損壞。這些螺旋槳由手工製造,製造過程中至少有一處發生卯釘接合錯誤的問題;此外,用來製造螺旋槳的材質也被判定過於脆弱。而根本的問題在於,柯林斯級潛艦螺旋槳推進器的原始設計主要著眼於降低噪音以及高效率,然而無法滿足澳洲方面在合約中要求的航速需求。 澳洲在柯林斯級項目的機動性要求,有許多方面更接近核能潛艦,包括安靜、快速、渡航時間長、長時間高速渡航、長時間在作業區值勤。結果以柯林斯級柴電推進系統的條件(如功率、轉速等),原始設計的螺旋槳無法達到合約要求的額定航速;尤其是柯林斯級後來艦體加長2m,推進器自然需要能產生更大的推利。因此,瑞典Kockums曾變更螺旋槳推進器設計來提高切過水體時獲得的推力,結果這增加了槳葉負荷,不僅增加了聲噪,也超過材質能長期承受的應力;經過幾年航行使用後,柯林斯級的螺旋槳開始發生金屬疲勞。 爾後, 皇家澳洲海軍自行將柯林斯級的螺旋槳推進器送至美國進行檢修,由五軸加工機台進行外型修正,並更換了接合錯誤的卯釘;然而,皇家澳洲海軍這項舉動引起Kockums原廠的不滿,認為 皇家澳洲海軍無權擅自對螺旋槳的設計進行修改。這個修改螺旋槳的爭議成為2000年中澳洲政府購併ASC廠並取得柯林斯級完整知識產權的行動中,Kockums廠方引以指控澳洲政府的要點之一。 其他推進系統的問題包括推進用主電動機在特定航速之下的振動過大(與修改燃油系統時取消一個飛輪有關),並間接導致若干周邊組件受損;由於渦輪機組的製造問題,導致高速航行之下的燃油消耗 超過標準。此外,推進系統運作產生的噪音也超過標準,相關原因包括排氣筏設計不良,發電機基座為了減輕重量導致減震效果不如預期(只在低速靜音航行時比較有效) 。柯林斯級渦輪增壓柴油機是由功率較小的機種直接放大而來,由於設計不周全,在特定航速下會發生共振,潛艦不能維持在這個航速下航行,否則震動會大到損害艦上裝備(例如電腦機櫃被震離基座)。而根據澳洲防衛科學與科技組織(Defence Science and Technology Organisation)的研究,艦上電池艙間抽氣風扇的供電設計不良,也成為噪音增加的兇手之一。柯林斯級的Type V18B/14渦輪增壓柴油機雖然推力強大,但是故障頻繁,長年困擾著柯林斯級。 先前瑞典廠商為本國設計的近岸防禦型潛艦,離開基地很快就可以到潛航伏擊作業區,使用柴油機的經航時間(從基地到不常潛航伏擊作業區之間的渡航)不長。然而澳洲海軍潛艦 離開柏斯到南中國海、東中國海距離至少在8000公里以上,距離俄羅斯符拉迪沃托斯克更超過10000公里以上。因此,柯林斯級以柴油機高負荷持續運轉的時間很長(相較於一般近海防禦型潛艦,從基地到伏擊作業區的距離通常只有幾百公里) ,消耗頗大,這顯然是柯林斯級的瑞典製推進系統問題叢生的根本原因之一。而在漫長的經航階段,柯林斯級經常以呼吸管狀態在水下高速航行,呼吸管切穿水面必定產生強大的噪音與震動;部分意見認為柯林斯級的柴油主機問題叢生,就是因為長時間在這樣的震動之下所造成的。 2.焊接品質問題 柯林斯級的艦殼在完工初期品質不良,焊接不牢固,在水下高速航行時會產生漏水(每小時進水高達300公升), 甚至有崩潰之虞;而艦內的高壓海水管路也同樣不牢靠,被認為隨時可能爆裂 。在船殼建造方面,柯林斯級的艦首船段等部位由瑞典Kockums原廠建造;瑞典潛艦廠商通常只使用部分深融焊接(Partial penetration weld), 這樣的艦殼強度已經能滿足較淺波羅地海水域;然而對於經常在深洋操作的 皇家澳洲海軍而言,全深融焊接(Full penetration welds)才能提供足夠的強度,不過柯林斯級的建造合約中並未對此做出明文規範。 為了盡量減少延誤的時程,首艦柯林斯號的艦首船段還是先運到澳洲,然後在當地就地進行再加工。 雖然如此,當2010年4月柯林斯號回廠進行例行大修時,由瑞典建造的艦首船段與逃生艙等部位仍被檢驗出焊接瑕疵,需要更大幅度的改進施工。 3.噪音問題 柯林斯級服役在1996至1997年的測試中被發現噪音超標(依照原始計畫需求,皇家澳洲海軍希望柯林斯級能比原有的妖王級至少安靜一倍),主要是在高速航行的情況下。高速潛航噪音來自於艦體與帆罩產生的渦流,這是因為Kockums先前為瑞典設計的潛艦都著眼於水淺狹窄的波羅的海,只需著重低速潛伏時的靜音能力,對於要在大洋上快速航行的需求則十分陌生; 柯林斯級的艦型設計以瑞典A17西哥特蘭級潛艦放大而來,以瑞典習慣的中低速為最佳化,在高速航行時會產生紊流。 雖然柯林斯級在早期競標階段已經做過船模測試,然而在1987年主合約簽訂 到1990年開工建造之間,由於許多技術要求有所變更,設計上進行過不小的改動, 這主要是因為負責研發整合聲納系統的法國發生失誤,低估了聲納系統所需的空間,因此艦首需加長1m來容納,為了平衡艦體後部也需要加長1m,艦首造型也做了進一步修改 來容納聲納系統;艦體加長2m後,由於需要的推進功率增加,螺旋槳推進器也需要變更,並且連帶修改了控制面 。由於提供艦首聲納的法國以及設計潛艦的瑞典,都不願意為這項疏失提供重新測試的經費,因此這些變更並沒有經過妥善的再測試,導致柯林斯級實際建成試航才發現,艦首與控制面等部位在特定航速(高速)下會產生紊流 ,不僅增加噪音,而且紊流通過尾部螺旋槳時造成不良影響, 使空蝕與振動情況過大;這種振動的情況不僅導致潛艇的噪音增加,也加劇推進軸的磨損並導致大軸軸封漏水。 除了艦首引發的紊流問題之外,柯林斯級原始設計的帆罩外型也有問題,不僅帆罩長度相較於艦體全長的比例太短,帆罩前端與艦體結合處在航行時,有比較嚴重的馬蹄渦流分離,這些都增加了艦體後段的紊流,進入了螺旋槳。艦首外型不當、產生紊流的問題,一直到澳洲利用航空風洞測試艦首模型時才被完全地發現與瞭解。不過,柯林斯級的低速靜音能力倒是沒什麼問題。 如同前述,螺旋槳的問題最後在美國協助之下解決,這些螺旋槳被送至美國重新設計與加工,使其靜音性能與推進效能都大幅精進。 至於柯林斯級的艦首段也在後續改進工程中進行必要的形狀修正,艦體外部也加裝玻璃纖維製造的擾流片以抵銷紊流;而為了解決帆罩前端與艦體結合部位造成的渦流問題, 柯林斯級的帆罩後部加長,帆罩前方底部加裝一個彎角造型來改善紊流。 4.潛望鏡問題 柯林斯的潛望鏡桅杆也被發現問題:由於桅杆設計不流線,升起之後會在海水中產生過大的阻力與振動,不僅影響桅杆上的觀測/通信設備運作(例如潛望鏡因震動而無法聚焦),也影響潛艦的航行操控。與艦上許多技術問題相同,潛望鏡問題的責任歸屬也曾引發爭議 (潛望鏡振動而無法正常運作的問題,也與艦體渦流進入螺旋槳導致的振動有些關連)。最後,潛望鏡的問題透過加裝一個整流罩來改善桅杆外型、降低阻力來解決。除了桅杆出潛望鏡本出現問題之外,潛望鏡光學部分也有瑕疵,包括改變倍率之後難以重新對焦、影像重疊問題等;問題的主因在於 皇家澳洲海軍要求潛望鏡系統必須將光學鏡頭設置在比紅外線熱影像儀和搜索雷達更高的位置,導致潛望鏡的光學通道必須繞過紅外線系統,進而產生聚焦等問題。潛望鏡光學系統的問題隨後逐步改進,至服役時已經大致不是問題。 5.Mclntosh-Presscott報告 在1998年澳洲國防部長John Moore上任時,決定由外部機構對整個柯林斯級計畫進行一個完整的獨立報告。John Moore任命由澳洲皇家科學與工業研究組織(Commonwealth Scientific and Industrial Research Organisation,CSIRO)主席Malcolm McIntosh與前BHP指揮官John Prescott為首,組成一個調查小組,針對整個柯林斯級專案進行詳細的調查,找出所有缺失並提出具體的解決方案。 在1999年6月1日,這份「Mclntosh-Presscott調查報告」正式出爐,其結論認為柯林斯級無法滿足 皇家澳洲海軍的軍事部署需求。 這份報告中總結了 歷年來柯林斯級發生的問題,包括 高速潛航時噪音過大、螺旋槳推進器出現裂痕、推進軸器封漏水、艦體與高壓海水管路品質不良、柴油機噪音過大且故障重生、潛望鏡設計不良導致鏡頭易沾污、通訊系統過時、射控 系統無法正常運作等 ,被點名有問題的次系統包括柴油機、螺旋槳推進器、潛望鏡與桅杆系統、戰鬥系統等 。報告中總結導致柯林斯級各項大小問題的起因,包括原始設計就有瑕疵、設計需求本身就有漏洞、主合約架構有諸多欠缺(尤其是當需求變更時,修改合約要求的考量並不周延)、生產施工品質不良、生產作業欠缺良好的統一領導,以及各次承包商之間協調不良,乃至於發生歧見與衝突,產生原本可以避免的敵意與不合作。 此報告認為戰鬥系統是柯林斯級最嚴重的核心問題;由於原始設計就問題重重,此報告建議徹底解決方案是完全推翻現有的作戰系統,以現成商規技術重新開發一套系統。 這份報告 雖然表示不少前列問題已經獲得解決,而且部分性能指標被證實超越原始需求,但最後仍嚴厲地抨擊了柯林斯級潛艦,認為這項澳洲史上最大最昂貴的國防建軍案 不僅無法滿足皇家澳洲海軍的軍事部署需求,且讓澳洲陷入新的戰略危機 ;然而有趣的是,該報告也指出該年度合約執行的價格並無任何大幅增加的跡象,並且認為經過長期改進計畫之後,柯林斯級仍能達到皇家澳洲海軍的操作服役標準。 雖然Mclntosh-Presscott調查報告被視為當時澳洲政府重整柯林斯級專案的具體象徵,但 皇家澳洲海軍與參與柯林斯級專案的相關人員單位都批評這份報告毫無新意,只是抄襲了皇家澳洲海軍與廠商早已在測試階段總結的諸多問題而已。 6.影響 柯林斯級的問題導致澳大利亞海軍、國防部與ASC大失顏面,澳洲媒體一度批評柯林斯級為「無用的潛艦」(Dud subs);澳洲方面將之歸咎於Kockums原廠 的設計與合約缺陷,而Kockums對此也申請仲裁。這些問題暴露出澳洲國防部在採購程序與管理實務上有許多重大缺失。柯林斯級的問題也成為澳洲國內政治炒作的材料;由於柯林斯級是在勞工黨執政任內進行建造,自然被對手自由 黨-國家黨聯盟(Liberal-National Coalition)拿來當作攻擊的焦點,並成為1996年勞工黨在大選中失利的原因之一。原本許多澳洲政客有意以柯林斯級的問題來追究海軍相關人員責任,甚至曾在1990年代中期提議放棄這個計畫;然而澳洲調查機構的最後報告責任為,柯林斯級 案中有許多無法預期的「不可抗因素」,並非相關單位怠忽職守或蓄意瀆職,因此最後並沒有任何皇家澳洲海軍承辦人員遭到撤職查辦。 除了上述諸多問題之外,柯林斯級的最大航速、機動迴旋性能以及低速潛航的續航力都符合標準;艦上的高自動化航行控制系統原本被預期為風險較高的部分,然而實際操作顯示其整體性能(尤其是在呼吸管深度的潛航深度維持能力)超過原訂預期。柯林斯級無論是專案的執行規模,或是對 皇家澳洲海軍與國防產業的影響都是空前深遠,因此解決所有問題、確保柯林斯級處於正常運作狀態,成為皇家澳洲海軍一項非同小可的議題;往後任何服役期間發生的狀況,都可能成為澳洲輿論與政客追究的焦點。 7.主要改進工程
經過2000年代初期的改良之後,柯林斯級的帆罩外型經過修改,後部延長, 前方增加一個彎角造型來減低阻力。 為了落實「Mclntosh-Presscott」調查報告的改善建議,且最後一艘妖王級潛艦Otama號除役在即(排定在2000年12月), 澳洲國防部長在1999年 底下令已交付海軍的前三艘柯林斯級回廠 進行大規模修改,相關改良也應用在尚未交付的本級艦。改進柯林斯級的總預算規模約10億澳幣, 目標是解決柯林斯級累積的一系列問題,項目涵蓋大至戰鬥系統、戰術資料處理系統、聲納、武器控制系統、靜音能力以及解決現有一系列工程和品質上的問題 ,包括更換全部六艘柯林斯級的艦內海水管路,強化部分艦殼不牢固的焊接點 。這些項目之中,關於載台設計與製造的問題能夠立刻予以修正或重新施工,但重新開發戰鬥系統 等工程規模較大,需要更長遠的規劃。因此,澳洲當局將柯林斯級改進分為短期的「fast track」與中長期的「get well」兩個部分,首先進行的「fast track」係「打補丁」的方式,將現有系統改善到能滿足起碼戰備部署需求的狀態,同時重新招標開發戰鬥系統;此外,澳洲政府 同時間也致力解決專案相關承包商之間的衝突,並正面回應輿論批評以及提供更多資料,化解外界輿論對柯林斯級專案的負面觀感;而需要長遠規劃的改進項目則屬於 「get well」的範疇(見下文)。「fast track」工程於2003年3月全部完成,原本柯林斯級的壓力殼在潛航時,每小時進水約300公升,修正後則大幅改善為每小時3公升。 柯林斯級升級計畫(SEA 1439) 整個柯林斯級的改進計畫代號為SEA 1439;除了澳洲海軍與澳洲國防業界之外,也獲得美國廠商的支援 。在2001年9月,澳洲正式與美國簽約,成為潛艦科技合作的長期伙伴,並選擇雷松(Raytheon)、通用電器船舶(GE Electrical Boat)作為雙方合作的美國承包商;美澳雙方為此成立聯合專案辦公室,主要業務是雙方海軍對開發新型潛艦戰鬥系統的研發、管理與支援作業。 在此一美澳合作關係之下,柯林斯級絕大 多數的技術問題,都在澳洲國防科學及科技組織(DSTO)以及美國海軍、通用電器船舶公司的協助下予以解決,尤其是將螺旋槳推進器送至美國進行調整,改善了原本的高速運轉空蝕問題,並 解決了柴油機噪音過大的問題; 由於採取了這些措施,皇家澳洲海軍批准讓六艘柯林斯級於2004年3月前正式加入戰鬥序列 。與原本相較,改裝後的柯林斯級在帆罩前端基部增加了一個類似海狼級的彎角造型,可降低航行阻力並減低水流通過的噪音,這也是改良後的柯林斯級在外觀上的最大不同。 SEA 1439共分為六個階段(Phases),分別如下: Phase 1/2:針對柯林斯級的缺失進行具體研究,擬定改進的方向、目標與具體措施,使其完全符合皇家澳洲海軍的作戰需求;而這也是SEA 1439接下來Phase 3~6的基礎。 Phase 3:稱為穩定性與可靠性強化(Sustainability & Reliability Enhancements),包括一系列改進潛艦系統可靠度、穩定性與安全性的措施,許多要點都基於McIntosh/Prescott報告的建議以及SEA 1439 Phase 1/2的研究結果。此外,Phase 3還會針對岸基後勤支援基礎建設的不足進行改進。大部分Phase 3中的小規模項目都在2004到2005年間完成,而一些硬體更換幅度較大的項目如增加配合特種部隊的能力、改善消防系統與改進污水處理系統等則配合柯林斯級各艦的翻修時程予以追加。 在Phase 3之後,進一步的Phase 3.1會針對潛艦的監視控制與管理系統(ISCMMS)進行更新,汰換已經過時或停產的設備。 SEA1439 PHRCE3:通信能力計畫(Communications Capability)。 Phase 4:稱為柯林斯級完整作戰能力(COLLINS Full Operational Capability),其中的核心項目是Phase 4A替換戰鬥系統(Replacement Combat System,RCS),詳見下文。而Phase 4B則是武器與感測器強化(Weapon and Sensor Enhancements),包含幾個子計畫,更新艦上的聲納、通信(此階段先在一艘柯林斯級潛艦上安裝、測試新的通信天線陣列)與導航系統。此計畫由ASC擔任平台整合工作,Mc Taggart Scott & Co做為裝備供應商,而美國Lockheed Martin Sippican則依照美軍對外軍售管道(FMS)的架構來供應裝備。這些計畫在2010年代前半陸續執行,進度最晚的項目是導航,預定在2015年完成。 Phase 5:基於柯林斯級持續改進計畫(Collins Continuous Improvement Program,CIP),為柯林斯級持續提供各項技術升級,分為Phase 5B.1、5B.2A、5B.2B等階段。CIP包括為SEA 1439先前幾個階段改進計畫的次系統持續進行升級;其中,Phase 5B.1稱為通信桅杆與天線更換(Communications Mast and Antenna Replacement Class Fit),為所有柯林斯級換裝Phase 4B階段所開發的新型通信系統,包含資料傳輸速率提高的極高頻衛星通信系統(UHF SATCOM) 桅杆,2017至2018年完成所有換裝工作。Phase 5B.2是隨後的通信與電子戰升級(Communications and Electronic Warfare Improvement),將更新柯林斯級的電子戰系統以及其他通信系統、更換通信中心系統、強化配套的岸基通信設施、增設艦內區域網路(Local Area Network,LAN)以及更新搜索潛望鏡上的紅外線熱影像儀等。 Phase 6:柯林斯級聲納汰換計畫(Sonar Replacement),包含艦上聲納系統與配套岸基訓練支援設施的更新。
總計整個柯林斯級專案的花費,從1986年簽約時的38.92億澳幣,至1993年由於通貨膨脹等因素,已經上漲到49.89億澳幣。 至2006年,澳洲已經為柯林斯級的建造工作花費了50.71億澳幣 (不包含fast track工程),然而如果考慮通貨膨脹,整個計畫超支幅度仍保持在4000萬澳幣以內(應是以1986年幣值為準)。至於後續追蹤問題與改進部分, 「fast track」改進工程共花費了11.7億澳幣,另外還有1.43億澳幣用於解決原始合約以外的問題。即便包含後續問題追蹤, 扣除通貨膨脹以後,整個柯林斯級專案的成本上漲也控制在20%以內。 依照澳洲2012年國防能力計畫(Defence Capability Plan 2012 )的報告,整個SEA1439柯林斯級提升計畫已經發包的項目價值9.74億澳幣;這份報告也估計SEA1439尚未發包執行的階段,其中Phase 3.1預估花費低於1億澳幣,Phase 5B2的估計花費約5至10億澳幣,Phase 6則估計要花費10至20億澳幣。 其他方面,在2006年,澳洲政府決定為柯林斯級裝備Sagem Défense Sécurité公司的SIGMA 40XP雷射慣性導航系統。從2007年,柯林斯級陸續換裝ArgoPhoenix AR-740-US攔截聲納。皇家澳洲海軍還在規劃SEA1354替換型潛艦逃生逃收搜救與棄船系統(Replacement Submarine Escape Rescue and Abandonment System,Replacement SERAS)。
SEA 1439 Phase 4A戰鬥系統替換計畫 在柯林斯專案中,實際上問題最大、耗費最多力氣去解決的,就是由洛克威爾研發的戰鬥系統。由於1980年代為奧克斯利級(Oxley class)升級時加裝的射控系統效能十分卓越,使皇家澳洲海軍信心大增,因而在接下來的柯林斯級專案中主導開發一種全世界最先進、最精良的潛艦戰鬥系統;然而實際上,澳洲方面低估了這件工作的複雜度與挑戰性,因此開出的規格雖高,但本身的管理經驗和能力卻不足以應付,種下了日後的遠患。 柯林斯級這套全分散作戰系統的野心超出於當時(1980年代末期)的計算機技術水平,作為專案監督者的皇家澳洲海軍以及主承包商洛克威爾 (此前並沒有建置軍艦用戰鬥系統的經驗)都犯了眼高手低的毛病,導致一開始系統架構就問題重重。在研發階段,作為次承包商的法國Thomson CSF與荷蘭Signnal,都拒絕釋出軟體的原始碼以及開發工具給洛克威爾,最後只好由澳洲計算機科學公司來接手軟體開發工作;由於該公司缺乏經驗,與澳洲方面專案負責單位溝通也不良,自然是問題重重。依照最初的合約規定,洛克威爾必須在1993年9月交付戰鬥系統,然而 這個時程並沒有達成。在該公司交付戰鬥系統軟體1.5版之前,柯林斯級甚至無法展開海試,因而拖累到整體測試進度。到1994年3月,戰鬥系統已經成為柯林斯專案最嚴重的問題,此時至少還有20%的軟體甚至連編譯都還沒完成。在往後幾年,戰鬥系統軟體始終是拖累整個專案的主要問題 ,整個專案60%的經費都消號在戰鬥系統的研發工作。另外,1980年代末期開始,由於超大型積體電路技術(Very-Large-Scale Integration,VLSI)的迅速發展,計算機運算能力飛快成長;柯林斯級戰鬥系統原始設計的硬體是1980年代水平,到1990年代後期潛艦剛開始服役時,就已經十分落伍。由於軟體工作開發十分漫長且進度落後,後來軟體撰寫時,都不得不遷就柯林斯級戰鬥系統原始的計算機硬體,而有不少妥協。 在1996年,洛克威爾出售其軍用與航太部門給波音,因此柯林斯級戰鬥系統相關開發業務就轉移到波音集團。波音集團接手後,認為如果要為柯林斯級提供一個可用的戰鬥系統,就必須將先前的系統架構整個推翻。起初 皇家澳洲海軍與政府都拒絕此一提案,於是波音便請雷松(Raytheon)公司協助修改軟體。經過與澳洲方面若干協商之後,澳洲政府同意降低要求,因此由波音、雷松合力完成的2.0版軟體終於得以在1999年底交付。 在2000年5月,波音將整個海事系統部門賣給雷松,因此雷松便接手了柯林斯級戰鬥系統的業務。 此後,澳洲方面開始傾向為柯林斯級更換整套戰鬥系統,就是SEA 1439 Phase 4A戰鬥系統替換案(Replacement Combat System,RCS),總共有美國的雷松澳洲分公司(Raytheon Australia)與洛馬集團(Lockheed Martin)、法國泰拉斯(Thales)、德國STN Atlas等四家廠商對此案感到興趣,並在2000年早期提交了方案。在2000年5月,澳洲防衛科學與技術組織(Defence Science and Technology Organisation)首先排除洛馬與泰拉斯的提案,稍後決定選擇ATN Atlas提出的ISUS 90-55(用於為以色列建造的海豚級潛艦)以及雷松的CCS MK-2(用於美國改良型洛杉磯級、俄亥俄級)進入第二階段決選。在評估之中, 澳洲國防物資暑(DMO)認為德國STN Atlas的ISUS 90-55會是風險最低且成本效益最高的選擇,因為ISUS系列原本就是針對柴電潛艦開發的戰系,較能配合柴電潛艦較為有限的空間、電力/冷卻與人手,而雷松CSS MK-2則是針對美國海軍核能潛艦的系統,在這些方面問題較大;在此階段評估之中,Atlas ISUS 90-55得分比CSS MK-2高30%。不過隨後澳洲自由黨政府與國防高層基於加強與美國的軍事戰略合作交流,在2001年7月建立美澳潛艦科技合作伙伴關係,隨後於 同年9月10日與美國雷松澳洲分公司 正式簽約,為柯林斯級提供最新型AN/BYG-1(V)8潛艦戰鬥系統(其戰術與武器控制系統就是CCS MK-2 Block 1C Mod6),而AN/BYG-1也被維吉尼亞級核能攻擊潛艦與改良型海狼級潛艦採用。Atlas ISUS 90-55雖然在評估階段可量化的項目得分較高,但很難與美製武器、次系統 整合,而且無法美國海軍的系統共同作業(例如 共同處理聲紋資料)。為了與柯林斯級聲納系統結合,新戰鬥系統也包含開發一個聲納介面,並納入美國與澳洲聯合研發的最新型MK-48 Mod.7先進寬頻聲納(CBASS)魚雷 的操作能力;而這項為柯林斯級更換魚雷的計畫被澳洲稱為SEA 1429重型魚雷汰換案(Replacement Heavyweight Torpedo System),因為這層合作關係,澳洲成為唯一能使用與美軍相同規格的MK-48 Mod7 CBASS魚雷的國家(其他北約主要盟國只能獲得降級的MK-48 Mod7AT,推進系統取自舊型的MK-48 Mod4魚雷)。 不過澳洲政府高層片面推翻評估程序的結果,在日後也難免留下一些爭議。 在2004年11月,澳洲和美國政府與美國海軍高層相關單位簽署關於AN/BYG-1潛艦戰鬥系統合作發展、生產與支援作業的備忘錄(Memorandum of Understanding,MOU),進一步確認柯林斯級換裝戰鬥系統計畫的後續研改、生產與技術支援細節(備忘錄有效期為10年,隨後又進一步延長到2019年10月28日)。 此一戰鬥系統重建案係在美國海外軍售管道(Foreign Military Sales)下執行,但有別於常規的FMS管道,美澳雙方基於雙方的合作管理計畫(Armaments Cooperative Project),在華盛頓設立一個柯林斯戰鬥系統替換的聯合計畫辦公室(Joint Project Office,JPO),並由美國海軍位於羅德島州(Rhode Island)新港(Newport)的海軍水下作戰中心(Naval Undersea Warfare Centre ,NUWC)支援相關的系統整合開發與測試工作。 由於這些與美國海軍建立專案合作關係的相關作業,導致戰鬥系統替換計畫在2004到2005年期間造成8個月的延遲,不過並不影響整體交付時程的進度。 而在雙方的合作架構中,澳洲也獲得機會長期與美國合作,持續接觸美國在潛艦作戰系統領域的最新發展。 值得一提的是, 由於美國向來擔心在輸出關鍵技術的時候,因為系統整合的關係而必須對歐洲等其他國廠商提供一些參數,進而使美國的機敏技術參數外流,經由歐洲廠商而被與美國敵對的勢力取得(如俄羅斯、中國等);因此,澳洲政府將原本與瑞典合資的ASC完全收歸國有,一個重要原因就是取得美國信任,願意與澳洲分享美國海軍最新、同步的潛艦相關技術,例如與維吉尼亞級同級的戰鬥系統以及同步發展先進魚雷等;而柯林斯級開始整合美製作戰系統之後,就不讓原本供應艦上相關次系統的歐洲廠商再來接觸。例如,為柯林斯級提供的AN/BYG-1潛艦戰鬥系統必須與艦上原有的法國Thales製聲納系統結合,由於美國擔心法國系統可能暗藏玄機獲得美國戰系的內部參數,因而在美製戰系與法製聲納系統之間採取保護措施,確保聲納系統的參數信號只能單方向輸出到美製戰系,而不能從美製戰系回饋信息到法國聲納系統。 SEA 1439 Phase 4A包括獲得AN/BYG-1潛艦戰鬥系統戰鬥系統以及相關的支援設施,包含聲納處理方案合理化與改進(Rationalisation and improvements to the Sonar processing solution),這是戰鬥系統延伸(Combat System Augmentation,CSA)計畫初始階段的一環,又稱為SEA 144。新設置的訓練與支援設施位於西澳洲史提林海軍基地(HMAS Stirling)的皇家澳洲海軍潛艦訓練系統中心(Submarine Training Systems Centre,STSC)。第一套在澳洲開發的系統在2005年7月完成,而第一套由美國負責開發的組件在2005年9月運抵澳洲。整合的系統測試工作在西澳大利亞的岸基設施進行,在2005年底完成。在2006年,ASC潛艦集團獲得執行第一艘柯林斯級潛艦換裝戰鬥系統工程的合約。 如同前述,重新開發戰鬥系統趕不上「fast track」計畫的時程;為了讓第四與第五艘本級艦德查紐斯克(HMAS Dechaineux SSG-76)與第五艘本級艦西恩號(HMAS Sheean SSG-77)即時交付 ,在2000年5月剛接手柯林斯級戰鬥系統業務的雷松仍保留原本洛克威爾開發的戰鬥系統,另外加裝若干先前為妖王級潛艦進行壽命中期升級安裝的次系統,以及若干外加的商規 模組;這項針對前述兩艘柯林斯級的計畫稱為SEA 1446 Phase 1柯林斯級潛艦過渡期最低操作能力(Collins Class Interim Minimum Operating Capability,IMOC)。 美國新一代的MK-48 Mod7魚雷於2006年7月開始量產,首艘換裝BGY-1戰鬥系統與MK-48 Mod7魚雷的柯林斯級潛艦是三號艦沃勒號(HMAS Waller SSG-75),工程配合該艦在2005年展開的塢修而進行,於2006年底展開戰鬥系統換裝整合工程,於2007年展開海上操作測試,2008年5月7日形成初始戰力(IOC);在IOC階段,沃勒號的改良武器處理與釋放系統(Weapon Handling and Discharge System,WHDS)與CBASS Spiral 1軟體與相關支援達到初始作戰發佈(Initial Operational Release,IOR),在2010年3月10日達到完整的作戰 發佈(Operational Release,OR)。在2011年3月8日,MK-48 MOd7 CBASS魚雷的先進處理器建設第四階段(Advanced Processor Build,APB4)軟體達到IOR。 日後BSY-1戰鬥系統升級時,也會回饋到澳洲柯林斯級上。 整個柯林斯級重新研製戰鬥系統的過程花費10億澳幣左右。 原本皇家澳洲海軍打算從2005到2013年間,配合柯林斯級的進塢大修期程而完成整個戰鬥系統換裝工作,不過由於後續種種問題導致柯林斯級的塢修期程延後,使得戰鬥系統換裝計畫到2016年才能完成。此外,原本柯林斯級戰鬥系統替換計畫的規模相當龐大,但由於AN/BSY-1戰鬥系統與相關次系統的規格係針對核能潛艦,其尺寸、耗電、冷卻散熱需求較高,柯林斯級現有的控制室空間與機電架構對此顯得十分吃力;因此,除了首艦沃勒號依照原始構想進行較大幅度改裝之外,後續各艦都逐漸減少硬體更動的範圍。 聲納升級 在2020年12月,Thales集團澳洲分公司獲得澳大利亞政府價值2370萬澳幣的合約,為柯林斯級設計、發展並整合Heron水雷與障礙物迴避聲納(Mine and Obstacle Avoidance Sonar,MOAS)以及高頻攔截陣列(High Frequency Intercept Array,HFIA)系統;其中, MOAS系統由澳洲海軍、澳洲國防科學與科技(Defence Science and Technology)以及Thales澳洲分公司聯合研製。這項聲納升級可以大幅提高柯林斯級潛艦在敵情顧慮強的近岸淺水域的作業能力,MOAS幫助潛艦順利通過海底海圖不夠詳盡且可能已經遭到佈雷的敵區淺水域環境,而HFIA則能察覺敵方高頻水下聲波(如主動聲納、魚雷尋標器等)。 LOT延壽工程 在2021年5月27日,澳大利亞廣播公司(ABC)新聞透露,澳洲參謀聯席會議正在進行一項機密的未來水下作戰研究,包括關於柯林斯級潛艦進行延壽升級工程(Life-of-Type-Extension,LOTE)、研究其他未來水下作戰選項如水下無人載具(UUV)等。一個消息來源向ABC透露,梅德中將的研究結果建議,將原本預定在2026年為柯林斯級潛艦進行的延壽升級工程(Life-of-Type-Extension,LOTE)提前到2024年展開,如此到2032年首艘新一代攻擊級(Attack class)潛艦下水前,能有五艘柯林斯級完成LOTE升級;然而如果這項決議獲得實行,原本琳達.雷諾將柯林斯級潛艦全壽期塢修業務從南澳轉移到西澳的企圖就會落空,因為LOTE勢必還是得在南澳執行;琳達.雷諾在2020年12月做出了這項承諾,但因為持續的延誤而受到挫折。在2021年5月26日在澳洲參議院一場聽證會上,澳洲財政部長告知一位參議員,政府大約會在6月正式做出對柯林斯級實施LOTE的決策,但拒絕透露全壽期塢修作業的具體期程。 為了進行這一輪延壽升級,ASC船廠還曾聯繫瑞典SAAB集團(原本設計柯林斯級的Kockums廠現在的母公司);柯林斯級原始設計的知識財產權,目前屬於SAAB集團。 在2021年6月11日,澳洲Defense Concept透露,澳洲國防部長Peter Dutton證實,準備花費約60億澳幣(46億美元),為現役六艘柯林斯級(Collins class)進行LOTE延壽升級,因應澳洲未來潛艦項目(由法國海軍集團執行的攻擊級潛艦)的落後。依照此時攻擊級潛艦的進度,首艦恐怕無法在2035年之前交付澳洲海軍,整個攻擊級艦隊也無法在2054年前達成全戰備能力(Full Operational Capability,FOC)。 依照先前2016年澳洲國防白皮書,當時只打算針對三艘柯林斯級進行延壽升級;但由於中國的海上威脅極速擴張,且攻擊級潛艦項目進度緩不濟急,所以最後決定六艘柯林斯級都需要進行LOTE升級。 LOTE項目咸信會由建造柯林斯級的ASC船廠執行,並由最初設計柯林斯級的SAAB集團協助。澳洲回去找SAAB集團協助ASC船廠進行柯林斯級潛艦升級,多少也有向法國海軍集團施壓的意味。海軍集團在2016年獲得澳洲SEA 1000未來潛艦項目合約之後,無論在執行進度、成本控制、保障澳洲本地產業執行額度等,都讓澳洲當局甚不滿意;尤其是在2020年底未能如期完成關於雙方戰略伙伴協議(Strategic Partnering Agreement,SPA)的所有議約,更讓澳洲當局非常光火。在2021年2月底法國海軍集團總裁Pierre Éric Pommellet前來澳洲談判時,澳洲方面據信揚言;如果法方無法滿足澳洲需要,不排除取消雙方的合作。直到021年3月23日,澳洲政府與法國海軍集團才簽署了SPA修正案,照澳洲的需求如保障澳洲本地產業佔額比例等。而到2021年5月,又有消息傳出澳洲打算尋找現成潛艦設計(如德國Type 214)以及進一步翻修柯林斯級,以填補未來潛艦項目服役前的空窗。因此,當澳洲政府確定斥資執行柯林斯級LOTE升級,回頭去找先前在SEA 1000競爭時被排除的瑞典SAAB集團,以及在未來潛艦項目被邊緣化的ASC船廠,等於是將一部份澳洲未來潛艦發展的主導權跟資源挪走。在先前簽署SPA時的紛擾之後,法國海軍集團也意識澳洲潛艦項目未來可能的變數,因此隨即執行了領導階層換血,在2021年5月31日任命Lilian Brayle接替Jean-Michel Billig,成為澳洲未來潛艦項目的執行副總裁。對於海軍集團在2021年上半對澳洲展現的誠意跟努力,澳洲國防部長Peter Dutton予以肯定,比少過去半年來法國方面展現了比以前更高的誠意,能視為雙方合作的正面信號。
服役表現 最後一艘柯林斯級剛服役之後,澳洲政府便在2003年10月與ASC公司簽訂一紙合約,在未來25年內為六艘柯林斯級進行維修以及性能升級業務 ,總值約30億澳幣,大約每七年能完成一次升級 ,並期望將六艘潛艦每年所需的操作維護經費,控制在10億澳元以下。 在2006年,首艦柯林斯號經過少許改裝,能夠支援特種任務。 而皇家澳洲海軍更在評估裝備美製戰斧之類的對地巡航飛彈,不過由於對於附近區域造成的政治與戰略衝擊太大,目前這個構想還不敢完全表面化。 柯林斯級潛艦在歷年來皇家澳洲海軍乃至於與盟國的反艦及反潛演習中均有不錯的表現,屢屢突破美國航艦戰鬥群的外圍屏衛。在2000年環太平洋演習 (RIMPAC 2000),一艘柯林斯級成功突破美國海軍航艦打擊群的反潛網並對航空母艦進行模擬接戰,判定擊沈美國海軍船艦。在2001年串聯衝擊演習(Operations Tandem Thrust 2001)中,扮演攻擊方的 西恩號在70m左右的淺水域痛擊美軍兩棲登陸艦隊 ,判定擊沈塔美軍拉瓦號(USS Tarawa LHA-1)兩棲攻擊艦與拉石茂山號(USS Rushmore LSD-47)船塢登陸艦,美國第七艦隊指揮官稱讚西恩號是「可以對抗世界任何海軍的強大靜音潛艦」。在2001年年底一次演習中,柯林斯級的西恩號(HMA Sheean SSG-77)與美國海軍洛杉磯級核能攻擊潛艦奧林匹亞號(USS Olympia SSN-717)在夏威夷附近海域模擬潛艦攻防演練,雙方多次互換攻守角色;在一次模擬交戰中,西恩號號先後對奧林匹亞號與兩艘美國神盾驅逐艦發射了28枚魚雷,並被判定多次命中,擊沈包括奧林匹亞號在內的美軍船艦。而在2003年一次演習對抗中,一艘柯林斯級也成功獵殺了兩艘美國海軍核能攻擊潛艦,美國海軍指揮官稱讚這艘柯林斯級安靜且戰力堅強。 在2003年2月12日,柯林斯級德查紐斯克(HMAS Dechaineux SSG-76)在 印度洋於一次極限潛航深度測試中發生驚險意外,在最大潛航深度附近,海水管路系統一個閥門突然破裂,導致12000公升的海水猛然灌入引擎室,險些沈沒; 幸而好艦上人員即時關閉所有外部閥門,止住了進水,並以高壓空氣全速吹除壓載水櫃,在最後關頭化險為夷浮出水面 ;事後調查顯示,如果這艘潛艦進水時間再多20秒,恐怕就會繼續下沈而無法挽救,爾後澳洲政府宣布已經解決了潛在問題。在2005年9月,柯林斯級在北亞及南亞海域完成長達55天的海外部署任務。 1998年,柯林斯級潛艦法恩科姆號(HMAS Farncomb SSG-74)三部柴油發電機都故障,導致該艦一度動彈不得。在2007年3月19日,法恩科姆號在太平洋水域執行一項為期五個月的情報蒐集/監視任務時,推進器被釣魚線纏住。在晚間,該艦上浮並派遣五名人員來排除纏在推進器上的釣魚線,然而當時海面波濤洶湧,五人都被捲走;隨後該艦立刻組織救援,志願參與的人員頂著大浪,冒著生命危險成功將五名人員救回。由於當時Farncomb號正在執行機密任務,因此這個事件直到2009年8月 皇家澳洲海軍表揚三名當時奮勇救人的志願者時才獲得媒體公開。在2012年6月中旬,澳洲雪梨日報(Sunday Times)撰文披露,事故當時Farncomb號正在監視中國海軍的船艦活動,包括蒐集中國海軍的通信內容;正因為任務敏感,所以Farncomb號在水下支撐到晚間才上浮來排除推進器問題,這也讓清除作業變得更為困難。 在2008年7月29日,柯林斯級的三號艦沃勒號(HMAS Waller SSG-75)在該年度環太平洋聯合軍事演習(RIMPAC 2008)中,發射一枚美國、澳洲聯合研製的MK-48 Mod 7 CBASS重型魚雷,擊沈作為靶艦的美國海軍除役史普魯恩斯級驅逐艦佛萊契號(USS Fletcher DD-992)。 這是柯林斯級潛艦首次進行MK-48 Mod7 CBASS的實彈射擊。 在2011年8月,法恩科姆號(SSG-74)在水下航行期間突然遇到推進電機故障,按照規定上浮準備進行維修處理時,故障又突然消失了。 在2012年5月,本級艦HMAS Dechaineux(SSG-76)原訂參加聯合盾牌軍事演習,但由於推進系統故障而取消。在2012年7月環太平洋軍事演習(RIMPAC 2012)中,法恩科姆號(SSG-74)成功以魚雷擊沈作為靶艦的美軍除役補給艦基勞亞號(ex-USNS Kilauea T-AE-26);但隨後法恩科姆號以通氣管航行為電池充電時發生機械狀況,一根屬於配平系統的軟管破裂,導致海水噴入機艙中,使得該艦退出演習返回珍珠港整修,這是柯林斯級在2012年內第二次因為機械故障而退出聯合演習。 在2012年9月15日,一艘柯林斯级在以柴油航行途中,發動機發生漏油,洩漏的燃料在一些絕緣材料上引發一場小型火災,不過艦上人員隨即關閉發動機,火災也立刻被人員以手提式滅火器撲滅。 在2016年7月下旬,澳洲國防部宣布藍金號(HMAS Rankin,SSG-78)完成了一項9個月的長期部署,刷新了柯林斯級艦隊的海外部署時間紀錄。澳洲國防部透露,這次藍金號部署期間曾在韓國外海參與太平洋國際潛艦逃生救援演習(Exercise Pacific Reach)。在2023年9月26日,澳洲廣播公司(ABC)報導,,柯林斯級的法恩科姆號(Farncomb SSG-74)上個月在海上發生一起電氣火災;依照後續澳洲海軍發言人的回覆,這只是一場小規模電器火災,艦上人員迅速撲滅火勢,潛艦也能繼續執行任務,沒有人受傷。 後勤維修與改善措施
在2008至2009年,由於機械與人員短缺問題,皇家澳洲海軍只剩三艘柯林斯級潛艦能維持值勤的循環,分別是藍金號、西恩號與 德查紐斯克號。到2010年10月初,澳洲大選結束過後,又有消息傳出 澳洲將考慮在短時間內把兩艘柯林斯級(藍金號與柯林斯號)除役。 在2009年10月,澳洲方面的資深工程師更透露柯林斯級的瑞典Hedemora Type V18B/14渦輪增壓柴油機柴油主機存在許多問題,可靠度始終不佳,在2009年只剩下一艘柯林斯級維持戰備值勤狀態;部分消息認為 皇家澳洲海軍可能別無選擇,必需再為柯林斯級大動手術來更換柴油機 ;但更換柴油機工程龐大(因為整個drive train甚至機艙空間都得變動),將耗費數億美元重新設計修改艦體結構,並耗費數年施工。為此,問題叢生的柯林斯級再度成為澳洲政府高層最關切的軍備項目。Type V18B/14渦輪增壓柴油機是瑞典Hedemora Diesel專門為柯林斯級研製的柴油機,之後也沒有其他國家潛艦使用;由於此機型如此獨門,澳洲Coote Industrial Ltd.在2006年2月買下瑞典Hedemora Diesel,可能就是要繼續支持柯林斯級的壽期維護。在2016年2月,Hedemora Diesel改名為Hedemora Turbo & Diesel並跟提供服務業務的 HS Turbochargers合併(2009年從Turbomeca購得)。 除了柴油機之外,柯林斯級的發電機、電池與電動機的表現也常遭到詬病 ,例如發電機震動過大、設計不良等,不過ASC船廠表示問題已經獲得解決。 在2010年初,澳洲國防部與位於阿德萊德市的太平洋海用蓄電池公司(Pacific Marine Batteries Pty Ltd)簽署兩份價值8100萬美元的合約,為五柯林斯級更換新的蓄電池。 當時ASC表示,預估在2010年左右,六艘柯林斯級將有四艘可達成值勤狀態,另外兩艘藍金號(HMAS Rankin,SSG-78)與西恩號(HMAS Sheean SSG-71)則在ASC位於阿德萊德的船塢進行大規模的壽命中期翻修改良,稱為全壽期塢修工程(Full-Cycle Docking,FCD)。然而,柯林斯級的二號艦法恩科姆號(Farncomb SSG-74)在2010年一月初又發現三組Jeumont Schneider主發電機中,有一組出現故障,導致該艦被迫停役檢修。 皇家澳洲海軍要求ASC改善效率,將原本每艘柯林斯級執行FCD工程的時間由原先預定的三年縮短為兩年,縮減一年約可減少六千至七千萬澳幣。此外,皇家澳洲海軍也打算與ASC重新簽署柯林斯級的壽命週期維護合約,把提升船艦可靠性與減少例行維持費用作為重要的績效指標。 除了潛艦本身遭遇的技術挑戰外,皇家澳洲海軍野心勃勃地擴軍時,卻面臨人手嚴重短缺的困擾。 早在1990年代後期,皇家澳洲海軍合格潛艦人員的數量就只有編制需求的40%。或許是為了補足人員,皇家澳洲海軍很早就開始嘗試讓女性人員在潛艦上服役;在1997年5月, 皇家澳洲海軍便實驗性地在頭兩艘柯林斯級潛艦柯林斯號與法恩科姆 上進行兩性混合編制的操作實驗,這使澳洲成為繼挪威之後,第二個允許女性在潛艦上服役的國家;在1998年,總共有11名女性海軍士兵與1名女性軍官在潛艦上服役。到了2000年代末期,皇家澳洲海軍經常只有不到100名合格潛艦人員,只夠讓兩艘柯林斯級潛艦維持滿員。 皇家澳洲海軍潛艦部隊招募困難的主因之一,在於潛艦被部署於澳洲西岸的柏斯(Perth),遠離澳洲人口集中的東岸,而西澳礦業能提供的薪資也高於潛艦部隊;即便是澳洲皇家海軍的艦艇官兵,也普遍希望被部署在澳洲澳洲東岸(澳洲主要大城市悉數集中在東岸),而不是偏遠而地廣人稀的澳洲西岸。綜合以上,皇家澳洲海軍自然很難吸引到足夠的澳洲青年願意從軍並部署在西澳地區。 另外,柯林斯級較低的出勤率也影響到潛艦部隊官兵的升遷與士氣;相較於澳洲海軍其他水面艦單位,潛艦部隊的人員崗位與體系較為獨立,而且組織規模不大,升遷機會較少;再加上柯林斯級較低的妥善率,阻礙了潛艦部隊人員因出海執行任務而獲得績效與升遷的機會。許多澳洲現役潛艦部隊人員都表示,一旦服役期結束就會退役,不會留在海軍中。為了留住潛艦人員,澳洲海軍不得不提高潛艦官兵的待遇,但這又導致一些澳大利亞海軍其他單位的軍官的收入不如潛艦部隊的水兵,連帶降低了整個澳洲海軍的士氣。 在2011年,澳洲政府聘請英國籍專家約翰.科爾斯( John Coles)領導的機構對柯林斯級艦隊的體系進行一項徹底的獨立調查,希望能改善慘不忍睹的出勤率,結果在2012年12月12日揭曉。這份報告指出整個柯林斯級潛艦體系運作的若干基本問題,而這些問題從1996年交付第一艘潛艦時就已經存在,也反應柯林斯級潛艦體系的運作未達國際標準。這份報告提出 若干建議,希望能在接下來以三年的時間來改善柯林斯級潛艦隊的運作。這項報告提出了一個比照國際標準的潛艦運行計畫至2016年(以25點計分),包含將每艘潛艦每次進塢 完整翻修的週期由三年降為二年(在兩次進塢大修之間,潛艦可以運行8年),任何時間只會有至多2艘潛艦進行完整的進塢大修程序 ,而其餘潛艦則只會有1至2艘在碼頭進行一般性的短暫例行維護;因此,六艘柯林斯級之中,可永遠保持至少兩艘柯林斯級處於值勤且隨時出動的狀態,有90%的機率有三艘可值勤,50%的機率有四艘可值勤的狀態。這項報告同時建議,為了實現這項報告的建議,ASC必須盡快轉為民營化來增加效率。而這項報告 同時也指出,柯林斯級完全可以服役到原始設計的28年壽期,沒有任何跡象顯示柯林斯級達不到這樣的壽期而必須提前汰換 ;以28年壽期作為計算,柯林斯首艦柯林斯號於1996年7月服役,最後一艘於2003年3月服役,意味六艘柯林斯級將在2024年至2031年陸續除役。而另一項柯林斯級壽期評估計畫(Collins Class Service Life Evaluation Program)也表示,如果有必要,柯林斯級潛艦的使用壽命還可再延長七年,達到35年,這使得六艘柯林斯級分別可服役到2031至2038年左右才退役。這些關於柯林斯級的壽命調查,主要是評估柯林斯級是否能服役到SEA-1000計畫的新潛艦接替(SEA-1000估計要從2030年代才能開始服役)。 在2011年7月下旬,澳洲國防部長史戴芬.史密斯(Stephen Smith)公布一份針對柯林斯級潛艦的審查報告。依照這份報告,澳洲總計花費60億澳幣以上來建立這支由六艘柯林斯級構成的潛艦艦隊,如果再加上服役後的後勤補保維修、改善缺失等費用,澳洲政府總共投資超過100億澳幣在這批潛艦上。然而,柯林斯級建成以來大小問題叢生,至今柯林斯級仍飽受柴油機可靠度不佳所困擾, 皇家澳洲海軍甚至因而懷疑柯林斯級是否能靠著現有的主機服役到原訂的2025年;此外,柯林斯級的發電機、推進電機、主蓄電池也是毛病不斷。而耗費鉅資建造與維護的柯林斯級,服役以來出勤率極差,服役以來許多時間都用在維修,甚至有時只有一艘能夠出海值勤。 在2012年,澳洲政府批准ASC集團和SAAB System為柯林斯級進行必要的升級,更換若干老舊的系統,並更新配套的岸上測試與後勤支援設施,這些是配合柯林斯級的全壽期塢修工程(FCD)來進行(FCD總工期約24個月,包括12個月塢期);第一階段工作合約總值6500萬美元,為第一艘柯林斯級進行升級,在ASC位於南澳大利亞阿德萊德的廠區進行;之後第二階段則包括測試升級後的第一艘潛艦,並為其餘五艘姊妹艦進行升級,預定於2017年完成。在2012年11月14日,澳洲國防部宣佈,已經與Thales集團簽署價值2200萬美元的合約,為六艘柯林斯級的聲納系統進行必要升級,包括更換一些過時的電子組件 ,這是柯林斯級的升級項目之一。更新組件的聲納系統將更可靠,體積重量更低,且功率消耗可以減少。這項升級的主要專業與後勤工程都在Thales位於澳洲新南威爾斯的分公司進行。 此外,澳洲政府也宣布在南澳地區建立一個供SEA-1000潛艦計畫使用的陸基測試設施,稱為潛艦推進/能源/補給與整合設施(Submarine Propulsion, Energy, Support and Integration Facility),這使得新潛艦的推進系統能在建造工作完成之前,就先在陸地上進行測試,此外對於維護現有柯林斯級潛艦隊的運作也有幫助。 前述約翰.科爾斯對柯林斯級艦隊提出的獨立調查報告之後,經過實行,柯林斯級潛艦部隊的妥善率終於有了顯著的改善,備便率達到了正常的水平。在2012年12月以後,澳洲海軍的柯林斯級艦隊基本都可以維持在60~90%。依照2014年澳洲海軍中將Ray Griggs的證詞,從2012年起至今,多數時候柯林斯級艦隊都有能有四艘值勤。2016年澳洲國防白皮書中指出,柯林斯級在2011至2012年時,柯林斯級的值勤比率只達到國際水平的一半,在此之前至多有三艘柯林斯級在長週期的大規模維修中。而實行2012年約翰.科爾斯報告建議的各項改進建議之後,柯林斯級艦隊的整備率獲得顯著提高;在2016年中期,柯林斯級的法恩科姆號(Farncomb SSG-74)會完成兩年的全壽期塢修工程(FCD)回到現役,此後柯林斯級就只剩下一艘在船塢裡進行FCD工程。澳洲的國防政策將持續保障柯林斯級的服役,直到被下一代潛艦接替。 由於柯林斯級艦隊的狀況在2010年代中期以後逐漸改善,澳洲政府在2017年10月將柯林斯級從「顧慮產品」(Product of Concern,由部長層級直接管理與監督)名單中移除;柯林斯級項目從2008年11月起就被列為「顧慮產品」。 在2024年5月下旬,ASC的總裁Stuart Whiley在參議院聽證會證實,西恩號(HMAS Sheean SSG-77)在奧斯本(Osborne)進行的計畫性塢修作業中發現多處鏽蝕,區域涵蓋部分肋骨以及水櫃,這種程度前所未見;為了處理這些鏽蝕,維修工作必須延長,估計最快要到2024年聖誕節左右才能完成。同時,下一艘排定計畫性維修的藍金號(HMAS Rankin SSG-78)抵達了ASC澳斯本船廠,準備進行計畫性的完整塢修週期;由於西恩號無法如期回到現役,使得此時六艘柯林斯級潛艦之中,只有三艘在值勤。這是2012年以來,柯林斯級艦隊首次值勤率降到50%。
柯林斯級的啟示 雖然從下水以來便不斷面臨各種挫敗,但柯林斯級專案最終還是讓澳洲獲得了世界一流的大型遠洋柴電潛艦;而期間面臨的 種種技術困境與系統缺陷,也間接促使美澳潛艦策略同盟的誕生,不僅能引進世界頂尖的美國潛艦技術來改善柯林斯級,更使澳洲與美國的軍事戰略與軍工產業合作達到新的高度。柯林斯級專案不僅從頭建立了澳洲的潛艦研製能量,澳洲 政府與產業界在此案中更獲得大量關於採購、基礎研發、計畫管理的實務經驗,對於澳洲三軍往後各項建軍計畫都有著莫大的助益 ;例如,澳洲國防物資組織(DMO)便是在柯林斯級專案執行期間因應實際需求而成立的組織。在柯林斯級專案執行期間,澳洲國防部很快就發現既有的計畫管控能力與經驗不足以應付這類具備多重風險、高度挑戰的複雜案子,進而促成澳洲相關採購程序的變革與完善,同時對於合約重要節點擬定更精準詳細的成本評估與風險管理標準,以及在過程中的各種檢討與追蹤程序。柯林斯級專案獲得的管理計畫經驗,隨後也被用於澳洲購買空中預警機的楔尾計畫(Wedgetail)中。 整體而言,澳洲在柯林斯級專案中雖然 挫折不斷,付出極為昂貴的學費,但是在相關領域中也獲得相當的成果 ;而澳洲政府不惜血本長期努力改善柯林斯級種種缺陷的過程,也顯示澳洲對國防與潛艦兵力的重視程度。 總體而言,澳洲這個潛艦工業的新手,第一次出手就開出了世界最頂級的規格,結果自然是問題叢生。 為了完善這個澳洲獨門的設計,長年來付出了極為可觀的代價,若干基礎毛病(例如毛病叢生的動力、機電系統)始終沒能根除;對照這樣的投入與產出,澳洲 量身打造自用潛艦是否合乎整體效益,無疑是個見仁見智的嚴肅問題。 更何況,雖然花了極大心力建立的潛艦的產能,但在完成六艘柯林斯級之後就沒有後續訂單,相關的技術能量與人材自然逐漸流失一空, 等到澳洲開始規劃再下一代潛艦時,又得重新訓練培養。 柯林斯級服役期間發現的的各種缺陷,除了由於澳洲方面經驗不足之外,原廠的選擇也是關鍵因素。瑞典雖然也是西方著名的潛艦生產國之一,然而先前瑞典Kockums廠只為自家海軍建造潛艦;瑞典海軍的潛艦需求屬於近岸防禦型,巡航時間短,主要作業範圍十分固定,潛艦值勤的伏擊區離母港不遠,艦上的主要架構、流體設計、推進機電控制乃至於維生支持等,都以長時間慢速潛伏作為主要的優化考量,艦上的射控作戰系統也僅以單純的本國近海專守防禦為主。然而 皇家澳洲海軍的潛艦部隊則以遠洋操作為主,母港與任務區域之間距離遙遠,在漫長的值勤期間可能會重新部署至其他伏擊區,故潛艦需長時間高速航行,作戰任務涵蓋本國防衛與海外積極攻勢任務;如此, 潛艦的外部構型、機電推進系統、自持力設計、靜音設計、維生支持乃至射控武器系統的考量,就必須適應長時間高速航行與長期海外部署的情況,自然與近岸型潛艦大不相同。澳洲將遠洋潛艦交給只設計過近岸潛艦的瑞典 ,無怪乎日後面臨諸多的流體噪音與機電運作等問題;顯然地,在遠洋潛艦方面,仍以美國最為擅長,而潛艦的偵蒐與射控武器系統又以美國的技術與經驗最雄厚, 加上美國與澳洲之間有緊密的戰略同盟關係,因此澳洲選擇由美國為問題重重的柯林斯級操刀改善。 柯林斯後續艦的波折 在2007年初,皇家澳洲海軍開始研擬取代柯林斯級的新一代潛艦計畫。在2009年5月頒佈的澳洲國防白皮書中,正式宣示將自行設計建造12艘新一代柴電潛艦 ,打算從2025年起陸續接替屆退的柯林斯級;在同年8月,澳洲國防部宣布即將對新潛艦案發下招標書,計畫代號為SEA 1000。 此一完全由澳洲主導研發的潛艦預計耗時30年(從初步規劃到最後一艘成軍),總預算初估高達250億澳幣(至多可能上看360億到400億澳幣) ,成為澳洲國防史上規模最大的武器發展計畫。經過多年的轉折之後,SEA 1000的結果在2016年4月26日揭曉,由法國DCNS集團獲勝。依照2016年澳洲國防白皮書記載,首艘SEA 1000潛艦可望在2030年代初期服役,這意味著柯林斯級潛艦勢必要進行延壽工程,才能服役到2030年代。 然而,SEA 1000由法國海軍集團得標以後,這項澳洲未來潛艦項目(後來稱為攻擊級,Attack class)逐漸大幅度地超支落後,且法國無法兌現在競標作業中承諾給澳洲本地產業的工業合作額度,澳洲與法國方面在程序中的摩擦與歧見日深。 柯林斯級延壽升級(LOTE)/SEA 1450 在2021年6月11日,澳洲國防部長Peter Dutton證實,準備花費約60億澳幣(46億美元),為現役六艘柯林斯級(Collins class)進行LOTE(Life-of-Type-Extension,LOTE)延壽升級工程(稱為SEA 1450),因應澳洲未來潛艦項目的落後。依照此時攻擊級潛艦項目的進度,首艦恐怕無法在2035年之前交付澳洲海軍,整個攻擊級艦隊也無法在2054年前達成全戰備能力(Full Operational Capability,FOC)。對此,澳洲工黨國防政策發言人Brendan O’Connor表示,他們歡迎這個遲到的決定,但是早在2013年12月就已經建議,柯林斯級必須進行升級來填補新潛艦服役前的戰力空隙,而且必須在2015年中下達決定;結果自由黨政府又拖了六年、歷經八任國防部長,直到2021年中才下達這個決定,而且是在未來攻擊潛艦計畫執行得慘不忍睹的情況下而不得不做,這是填補自由黨政府自己造成的戰力空隙。而澳洲戰略政策研究所(Australian Strategic Policy Institute)Marcus Hellyer專家表示,由於潛艦項目期程一再延後,一開始澳洲政府可能覺得為三到四艘柯林斯級進行延壽就夠了,但實際上可能需要五艘來確保隨時有潛艦可用,而最好六艘都能升級來提防更進一步的延遲。 依照2026年5月22日澳洲國家審計辦公室(Australia Natoinal Audit Office, ANAO)一份國防部柯林斯級潛艦延壽工程計畫與執行(Defence’s Collins Class Submarines Life of Type Extension — Planning and Implementation)的評估報告,對柯林斯級升級項目範疇的評估始於2016年6月,最初著重於升級前三艘同型艦柯林斯號(HMAS Collins SSG-73)、法恩科姆號(HMAS Farncomb SSG-74)與瓦勒號(HMAS Waller SSG-75),並在2018年9月正式總結。在2021年9月,澳洲政府宣布全部六艘柯林斯級都要執行延壽,使役期延長12年。原本六艘柯林斯級預計在2028至2036年陸續除役,延壽後的除役期程推遲到2040至2048年。LOTE項目已經在2021-2022至2031-2032的10年週期裡批准156億澳幣預算額度,並且被國防部列為「高風險」項目。 在2021年9月16日,美國、英國、澳洲三國總理聯合發表宣言,啟動「AUKUS」(AU-UK-US)三方聯盟,項目包括關於潛艦以及分享先進軍事技術等,而澳洲則會在美國、英國協助下發展本國的核子動力潛艦;這也意味著澳洲取消與法國的潛艦合作。外界推測,澳洲中途取消攻擊級潛艦項目,轉向技術難度更高且澳洲毫無基礎的核子動力潛艦,花費的時間勢必更久;這代表柯林斯級潛艦必須服役更長的時間,預估到2040年代才能完全退役。有消息推測,柯林斯級可能必須服役到2048年左右。 在2021年9月28日,SAAB澳洲分公司主管Andy Keough透露部分柯林斯級LOTE升級項目的可能方向,包括翻新推進系統(如傳動機械、發動機與發電機等)等;如果SAAB確定能參與項目,可能會使用與SAAB為瑞典本國建造的A26潛艦的類似技術。 在2021年10月中旬,澳洲海軍司令Mike Noonan中將在參議院接受質詢時表示,如果澳洲核能攻擊潛艦不能在2024年開始服役,則現役柯林斯級必須進行兩輪完整的大規模翻修延役來填補戰略空隙;這代表柯林斯級可能需要服役到2040是至2050年左右,相當於再服役20到30年。不過,如果之後潛艦耐壓殼發現疲乏的證據,柯林斯級恐怕無法執行第二次如LOTE的升級。 在2022年4月18日,澳洲國防部長彼得.達頓(Peter Dutton)巡視阿德萊德的ASC Osborne船廠時宣佈,將由ASC船廠執行價值柯林斯級升級工程,價值3.81億澳幣,主要項目可能包括更新光電桅杆等系統。獨立參議員Rex Patrick表示,澳洲政府片面取消攻擊級潛艦項目而轉向核子潛艇之後,柯林斯級延壽升級項目只是南澳ASC船廠能獲得的「安慰獎」,但實際上並不能預見未來十年內南澳能建造任何新潛艦;由於澳洲本地對核子工程領域毫無基礎,考量到效率,相關工作很可能不會由本地執行。Rex Patrick說,澳洲政府決定轉向核子潛艦,相當於「從煎鍋中跳出到火中」;鑑於當今的戰略環境情勢,澳洲更承受不了數十年空窗來等待一支嶄新的潛艦部隊。澳洲必須有更務實的道路,在本土建造現成設計並經過本國業界修改的潛艦。 在2024年6月5日,澳洲國防部宣布批准柯林斯級LOTE潛艦升級延壽項目進入下一階段,首艘接受延壽升級的是法恩科姆號(HMAS Farncomb SSG-74),工程在2026年於ASC在奧斯本船廠展開;整個柯林斯級LOTE延壽項目預計花費40億至50億澳幣。此項聲名表示,先前聯合政府曾透露的柯林斯級光電桅杆升級(optronics upgrade)將不會執行,避免為LOTE延壽工程增加不必要的複雜度與風險;而澳洲政府也採納澳洲國防部的建議,LOTE項目將不包括增加戰斧巡航飛彈運用能力,因為美國方面評估認為既不可行,也不具備經濟效益。 依照2024年6月27日澳洲廣播公司(ABC)的報導,澳洲政府與ASC船廠簽署價值22億澳幣的合約來為四艘柯林斯級進行延壽升級工程,為期4年,確保柯林斯級服役到2030年代以後。澳洲國防工業部長Pat Conroy表示,此一合約會在ASC所在的南澳奧斯本(Osborne)創造700個新工作機會,在西澳亨德森(Henderson)創造400個工作機會。估計在AUKUS潛艦項目正式啟動之前,柯林斯級延壽工程能為南澳與西澳相關工業維繫1600個工作崗位。柯林斯級上一個服役保障合約(In-Service Support Contract)是在2020年簽署,其金額包括約1.2億澳幣的效率紅利(efficiency dividend),這直接減少了實質投入潛艦維護作業的經費, 影響了柯林斯級維護工作的層級;而在2024年6月工黨阿爾巴尼斯政府(Albanese)與ASC簽署新一輪四年期柯林斯級維護合約,就沒有任何有害的效率紅利條款。 在2024年8月2日,美國的李奧納多DRS(Leonardo DRS,原DRS Technologies, Inc.,現為意大利李奧納多子公司)獲得美國海軍合約,會為美國海軍現役核子攻擊潛艦(維吉尼亞級)、未來哥倫比亞級彈道飛彈潛艦以及澳洲攻擊潛艦 (延壽升級的柯林斯級潛艦等)提供技術插入-26(Technology Insertion-26,TI-26)的計算機軟硬體,涵蓋後端顯示、工作站、處理器、網路系統等,合約涵蓋設計、採辦、生產、零附件、測試、安裝與工程支援等。 在2024年12月13日,澳洲政府發佈聲明,將柯林斯級潛艦項目重新列入「顧慮產品」(Product of Concern),意味著對柯林斯級項目的能力審查作業提高到部長層級(先前在2008年11月到2017年10月,柯林斯級潛艦曾被列入「顧慮產品」項目); 為此,澳洲國防部要制訂一個修正計畫,以便在2025年初能夠執行一個顧慮產品層峰會議(Product of Concern Summit)。「顧慮產品」是澳洲政府監督管理關鍵國防能力的 重要工具,確保在國防部長層級的直接管理下,能有效結合業界力量來維護這些重要國防能力,進而捍衛國家利益。工黨阿爾巴尼斯(Albanese)政府上任後,翻修並強化了國防部的「顧慮產品」管理機制。納入「顧慮產品」意味著澳洲國防部會採取更複雜的措施來,確保柯林斯級能服役到超過原訂的壽限,包括實施必要的操作限制(如潛航深度等);這可能意味著柯林斯級的結構與資材狀況已經出現高於預期的老化, 也意味後續的LOTE工程可能會遇到更多挑戰。依照稍後的消息,至2024年12月,六艘柯林斯級中有五艘無法值勤。 在2025年8月8日,BAE Systems集團宣佈,堪陪拉當局已經授出兩份大型合約用於柯林斯級潛艦的維持工作,執行到2030年初期;其中,Thales澳洲分公司已經獲得價值1億7800萬美元的合約展延,為柯林斯級的Scylla聲納套件(含艦體主/被動陣列聲納、後端信號處理、拖曳陣列聲納等)執行計畫性維修、作業支持、工程服務、過時管理(obsolescence management)、能力升級、製造與維護拖曳陣列聲納等;而BAE Systems澳洲分公司也獲得一份為期5年、價值8900萬美元的合約展延,為六艘柯林斯級艦隊全部的16具潛望鏡系統提供全面的維修、後勤支持、工程服務等。 在2025年11月,澳洲海軍能力主管(Head of Navy Capability)史蒂芬.休斯少將(Rear Admiral Stephen Hughes)在雪梨舉辦的印太2025(Indo-Pacific 2025)海軍展中向Naval News透露,在澳洲投入AUKUS核動力潛艦項目的同時,要同時負擔柯林斯級是個相當大的挑戰;此時,澳洲方面潛艦相關人員,約有160至200人在英國與美國負責AUKUS核動力攻擊潛艦項目,意味大約相當於2/3可用於柯林斯級項目的人力,而同時澳洲又要啟動柯林斯級的延壽與能力升級計畫。澳洲國防部也向Naval News透露,柯林斯級延壽升級牽涉到包含持續進行的維護作業、選擇性能力強化以及LOTE延壽升級;而LOTE延壽升級會盡可能提高潛艦的能力與可獲得性,同時不犧牲安全性。 首艘執行LOTE工程的柯林斯級是法恩科姆號(HMAS Farncomb SSG 72),主承包上是位於南澳奧斯本(Osborne)的澳洲國營ASC船廠,工程排訂在2026年中展開。在2025年10月澳洲參議院聽證會上,澳洲海軍司令馬克.哈蒙中將(Vice Admiral Mark Hammond)表示,每艘柯林斯級進行LOTE升級的時間粗估約2年,而具體的工期會依照評估每艘潛艦的狀況而決定,包括評估每艘潛艦面臨的風險以及問題,針對性地制訂工程方案來處理;經LOTE升級後預計使每艘潛艦壽命延長10年。國防部長里查.馬里斯(Richard Marles)認為,每艘柯林斯級花兩年時間進行LOTE工程是可行的,但需要非常聰明地執行。依照此時澳洲整合投資計畫(Integrated Investment Program),大約有40至50億澳幣(約27億至34億美元)來維持潛艦部隊的有效性與可靠性;而澳洲潛艦協會(Australian Submarine Agency)估計LOTE花費為43至64億澳幣。到此時,澳洲政府還沒宣布LOTE會具體執行的項目(到2024年已知將戰斧巡航飛彈以及Safran的非穿透光電桅杆排除)。在印太2025展上,雷松澳洲分公司(Raytheon Australia)宣布獲得2億7700萬澳幣合約的合約延伸,繼續管理維護柯林斯級的戰鬥系統。 在2026年5月19日,澳洲國防部長里查.馬里斯在勞伊機構(Lowy Institute)的演說中透露,柯林斯級的法恩科姆號(HMAS Farncomb SSG 72)會於5月底展開延壽工程,由位於南澳的澳洲國營ASC船廠負責;延壽工程預計耗時約2年,能使潛艦壽命延長10年。馬里斯也透露,會對每艘柯林斯級進行評估,來決定升級工程是否要包括更換新柴油主機與發電機;這代表柯林斯級的武器系統與作戰能力會獲得升級,但推進系統則不一定。依照前美國海軍軍官Gloria Valdez主導的一個秘密審查,認為柯林斯級在不更換發動機的情況下繼續服役10年,因此可縮短升級所需要的時間與成本。此外,變更後的升級計畫也會為一些艦齡較新的柯林斯級如此時正在升級的朗金號(HMAS Rankin SSG-78)投入額外資源。此時,澳洲預計花費110億澳幣來為柯林斯級進行延壽,比先前澳洲整合投資計畫估計的40至50億澳幣大幅提昇,延壽後年限從原訂30年增為40年,。
|