|
在2021年9月,第二海相(Second Sea Lord)尼克海因中將(Vice Admiral Sir Nick Hine)首次披露皇家海軍開始推動的持續作業部署系統(Persistent Operational Deployment Systems,PODS)概念,將任務裝備與附屬支持設備集中在TEU集裝箱(20或40英尺)裡,成為一個可快速裝卸、隨插即用(plug and play)的模組單元,能迅速部署在船艦上,並能輕易進行全球運輸。在2021年英國國際防務裝備展(DSEI 2021)中,英國首次展出POD模組概念模型,當時展出的是一個指揮控制(Command and Control)的POD艙。POD模組的可能應用包括醫療艙室模組、無人空中/水面/水下載具的收容與操控模組、指揮管制模組、用來發射與控制武裝無人機/遊蕩彈藥(loitering munitions)的打擊模組等,甚至不排除結合反艦/巡航飛彈發射器的打擊模組(需使用40英尺集裝箱)。
PODS概念模組的可攜帶作戰中心(Portable Operations Centre
,POC),用於水雷反制作戰;POC已經開發完成,皇家海軍發展的自航式水雷反制無人載具就以POC模組作為指揮管制與資料處理節點。
PODS概念的醫療模組,在TEU集裝箱設置一間診療室與一間手術房。
PODS概念的指揮管制模組,配備基於未來陸戰突擊隊(Future Commando
Force)概念的強化虛擬環境(Enhanced Virtual
Environment,EVE)的基礎設施,結合大型3D顯示屏以及虛擬實境(VR)技術。
PODS概念的無人機(UAV)儲存與發射模組。
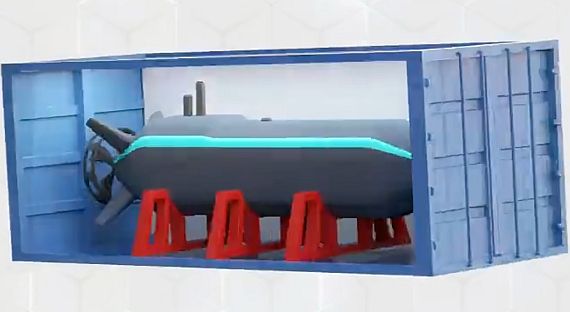
PODS概念的超大型水下無人載具(XLUUV)儲存模組。
PODS概念的打擊模組,結合小型戰術精準航空設備如制武裝無人機、遊蕩彈藥(loitering
munitions)的發射器,以及指揮控制系統。
PODS概念的工場模組,具備CAD工作站、雷射掃描機與3D打印機,能迅速用3D打印方式產製需要的部件。 此工場模組概念主要用於支持維護無人機,但也可以擴展到支援任何維修工作。 正在樸次茅茲吊裝一個PODS集裝箱模組的帕特里克.布萊克特號。
在2022年下旬,OCTO釋出兩份商業合約,其中Lot 1是兩個醫療用PODS模組,而LOT2則是五種PODS測試與實驗估(Test and Experimentation)原型涵蓋新型能源供應(novel power generation)、無人任務(uncrewed mission)等。在2023年2月,位於費勒姆(Fareham)的中小型工程公司武力發展服務(Force Development Services Ltd ,FDS)獲得這兩個合約。其中,醫療用海軍POD模組(Medical NavyPODS)主旨是發展一種足跡(footprint)相當於ISO 20英尺集裝箱、隨差即用(plug and play)的醫療艙模組,能快速在一般船隻上部署。
海軍醫療PODS發展 |