
英國潛艦聲納系統(2)--Type 2001/2020主/被動聲納
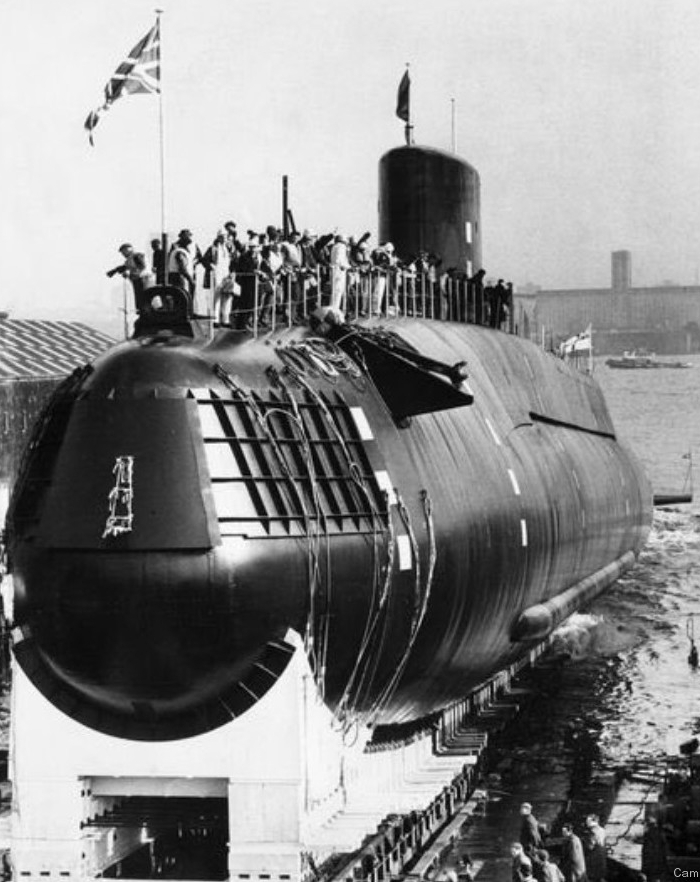
皇家海軍第一艘核子潛艦無畏號(HMS Dreadnought S101)1960年10月21日在維克斯.阿姆斯壯造船廠
下水的照片。注意艦首上半正面為向上傾斜的形狀,裝有Type 2001主/被動聲納的大型馬蹄形陣列;
而艦首下半則布置魚雷發射管。
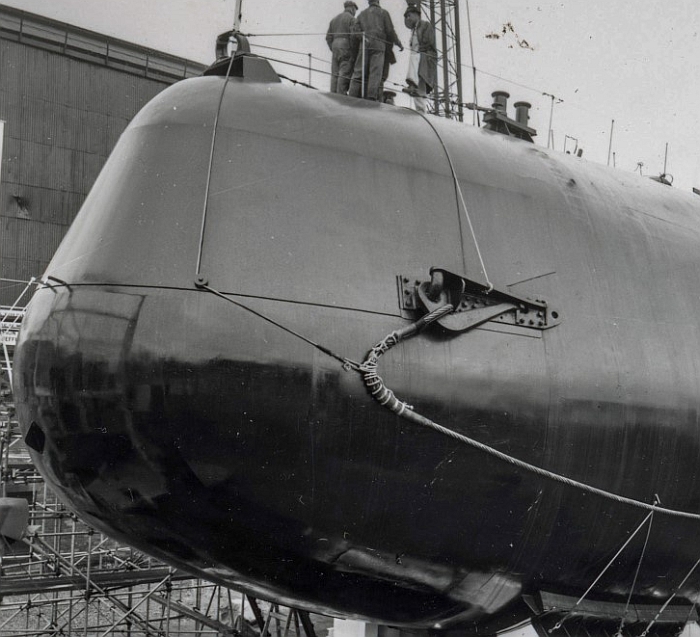
下水前夕的無畏號艦首近照。可以看到艦首上半Type 2001聲納陣列的安裝位置。
第四艘決心級戰略核潛艦復仇號(HMS Revenge S27)在1968年3月15日在Cammal Laird船廠下水;
艦首的Type 2001陣列佈局與無畏號相同,都設置在艦首上方。注意艦體兩側下部的條狀物是
Type-2007型低頻長距離線性被動陣列聲納。
主要參考資料:The History Of British Submarine Sonars by Commander David Parry
──by captain Picard
|
2001艦首主/被動陣列聲納 起源 在1950年代皇家海軍規劃建造核子攻擊潛艦(SSN)以及建構搭載彈道飛彈的戰略威懾潛艦(SSBN)時,也包括研究適配於核子潛艦的聲納;初步研究後,皇家海軍決定發展一種大型聲納陣列,以最有效地運用與部署核子潛艦。依照當時的各種較樂觀的假設如主動聲納在保護船團的可能應用場景、潛艦自身噪音降低的程度...等等,當時的結論是需要一種兼具主動與被動操作能力的陣列聲納,並著重主動聲納的性能。 於是在1957年,英國正式啟動核子潛艦用主/被動陣列聲納的項目,並確立了其主要設計特性。依照先前皇家海軍聲納系統的序號,此聲納型號應訂為Type 201,不過為了反應其技術複雜性,所以稱為「Asdic Type 2001」;隨後英國將水聲探測器從Ascid改為美國的名詞「聲納」(sonar)之,項目名稱也改為2001型聲納(Sonar 2001)。 初期規劃/性能指標 依照2001型聲納項目設定的指標,以皇家海軍在二戰期間設計、戰後服役的安菲翁級(Amphin class,簡稱A級)潛艦為敵潛艦指性能標,在良好的操作條件下,預期能在30英里距離上、2級海象(sea state 2)的深海環境中探測到以8節航速潛航的潛艦。若自身潛艦以10節速度航行,前述條件下對敵潛艦探測距離為17英里;而當自身潛艦以20 節航速航行時,探測距離為6英里。 2001型聲納也考慮了利用聲學匯聚區(convergence zones)等深海聲道現象 ,利用匯聚區時,對於寬向暴露(broad aspect)的敵方潛艦,偵測距離預期約為25至30海里。同時,2001聲納也考慮了 利用海底反彈(bottom-bounce)的操作能力,但由於當時對此現象的了解甚少,未能提供具體預估數據。在主動發射(active transmission)模式下,2001項目的文件並未指出指標,但當時預期的偵測距離如下:在潛艦本身航速5節以下時,對寬向暴露(Broad Aspect)的目標的探測距離約25英里,對窄向暴露(Fine Aspect)目標探測距離15至22英里;潛艦本身航速10節時,對寬像暴露目標探測距離約18英里,對窄像暴露目標探測距離約12英里;潛艦本身 航速20節時,對寬向暴露目標探測距離約8英里,對窄向暴露目標探測距離約5英里。 UDE的研發努力 皇家海軍負責研究潛艦聲納的機構是海軍部水下武器部門(Admiralty Underwater Weapons Establishment,AUWE)之下的水下探測部門(Underwater Detection Establishment,UDE);UDE分派18名資深主力人員組成2001聲納項目的專案團隊,由山姆.梅森(Sam Mason)領導。山姆.梅森先前參與Type 177型艦載聲納系統的開發工作。與Type 177艦載聲納相較,可以清楚體現Type 2001的世代差距:Type 177使用約400個真空管(valves),擁有4個接收波束,涵蓋40度方未繳;而2001型聲納則有96 條互相關圖(correlograms),覆蓋的方位角高達240度,而且發射與接收端全面採用當時僅問世10年的電晶體(transistors)技術,總共使用約16000個電晶體(transistors)。全面使用電晶體的設計受到部分質疑,認為太過超前、風險過大;為了執行項目,UDE的專案人員還去上夜校來補修電子學知識,以補充對於當時極其新穎的電晶體的知識。 山姆.梅森先前在都卜勒(Doppler)訊號處理上的貢獻,使他受邀赴美國進行技術報告;赴美期間,他也觀察了美國同時期發展潛艦用陣列聲納的進展;這次經驗對山姆.梅森的設計理念影響深遠,尤其讓他確信美國的部分技術路線是錯誤的。 照山姆.梅森的詮釋,2001聲納系統的設計理念如下:他認為對戰略核潛艦(SSBN)而言,被動聲納(passive sonar)是絕對必要的,因此他主張將聲納陣列換能器(array transducers)的間距設計成對應6.5kHz的頻率,而不是3.2 kHz。這項建議最終被接受,一方面是因為在面對非常安靜的目標時,能提供較佳的近距離探測性能;另一方面,這樣設計也讓換能器的結構更容易實現。 在這樣的理念下,2001型聲納在被動模式下擁有兩個被動操作頻帶,分別是低頻(LF,800Hz~1.5kHz,不過後來實際上是1.5KHz~2.6KHz) 與高頻(HF,5.5K~6.5KHz)。低頻段(LF)以寬波束以進行遠距離探測,此時方位精度不是關鍵;LF模式能偵測噪音較大的目標,但對極安靜的目標效果不佳。而在高頻段(HF)下,互相關波束的寬度僅2度,可提供極高的追蹤精度,對安靜目標的短距探測能力也比較好;雖然高頻聲學信號易被海水吸收,導致長距傳播損失增加,但在10000碼以內的短距離上並不構成問題。基於這些設計決策,2001聲納系統需要一個非常寬頻的多波束波束形成器(multi-beam beamformer),具有24條主動波束(active beams),由48對半波束構成,每個半波束以5度間隔排列。此一這套設計理念在多大程度上受到美國同時期數位多波束聲納(Digital Multi-beam Sonar,DIMUS)的影響(不論是採納還是刻意排除),目前仍不清楚。 安裝位置的爭執 在2001型聲納設計階段,關於陣列的安裝位置,一度引發了2001聲納專案團隊(Sonar 2001 Project Team)與魚雷發射團隊(Torpedo Launching Team)的爭執。魚雷發射團隊基於魚雷管布置的最佳化,主張聲納應維持先前安裝在潛艦上方,也就是Type 187攻擊聲納安裝在艦首上方球狀外罩(dome)的設計,使整個艦首都用來布置魚雷管;但2001 聲納專案組則堅持,聲納陣列應做成貼體艏部陣列(conformal array in the bow),達成較佳的聲納涵蓋面並降低流體噪音(flow noise),然而魚雷管位置就必須遷就聲納陣列。 在某次於UDE或國防部(MoD)舉行的會議上,2001聲納團隊與魚雷發射團隊發生激烈爭辯,會議主席極可能是當時的第一海務大臣(First Sea Lord)海軍上將路易.蒙巴頓勳爵(Admiral Louis Mountbatten)。當時魚雷管團隊稱:「你得讓潛艦有牙齒(You’ve got to give the submarine teeth)」,暗示魚雷發射管應該擁有優先權;2001聲納組則反擊:「你這樣是給它光禿禿的牙齦!(You have given it bare gums!)」。據說在這場爭論中,2001聲納專案組帶來了一艘美國青花魚號 (USS Albacore) 潛艦的模型以及一艘塑形黏土(plasticine)潛艦模型;當蒙巴頓詢問2001聲納組希望聲納安裝在哪裡時,2001聲納組人員直接用黏土在潛艦艏部塑出設計示意,據稱蒙巴頓看到之後說:「看起來不錯,就這麼做吧!」(That looks quite nice, you can have it.)」最終,2001聲納專案組的意見獲勝。 基本設計 2001型聲納在當時是劃時代的最尖端聲納系統之一,其工程品質讓美國欽佩,法國更十分驚艷——由於堅持不購買外國聲納,法國轉而向英國要求取得設計,然而遭到英方拒絕。另外,即便裝艦以後,2001型聲納也沒有被皇家海軍列入正式服役的裝備,因此得以繼續進行各種研發修改,不受常規的後勤維護體制所規範;這意味許多英國核子潛艦搭載出海的2001型聲納是剛開發完成、尚未正式定型的新版本系統,尤其是最早三艘搭載2001X的潛艦(英國首艘核子攻擊潛艦無畏號,以及前兩艘勇士級核子攻擊潛艦)。 1.水聲陣列 根據最初的設計,2001聲納陣列被安裝在艦首水平中線以上,長條的陣列長40英尺(12.2m)、高7英尺(2.13m),呈現馬蹄形圍繞著艦首正面以及兩側;配合艦首上方外型,陣列內傾20度。皇家海軍首艘核子潛艦無畏號(HMS Dreadnought S101)以及第一種彈道飛彈潛艦決心級(Resolution class)的2001型聲納都採用如此配置;然而,此種設計導致自噪音(self-noise)偏高。另外,由於陣列在艦首上半並向上傾斜,使得聲納向下垂直波束(downward vertical beam)角度受限,無法使用「海底反彈」(bottom bounce)操作。另外,隨後操作經驗也發現,設置在首上的陣列很容易接收到從海面反射回來的潛艦自噪音以及週邊環境噪音。在後續快捷級(Swiftsure class) 與 特拉法加級(Trafalgar Class) 潛艦的2001型聲納BC版本(BC variant,見下文) 中,就把艦首陣列改安裝在艦艏中線以下,獲得較佳的波束俯視角度並降低自噪干擾;為此,艦首形狀與魚雷管配置都要修改,魚雷管從正面移到艦首下方兩側。 2001型的艏部陣列包括21個鑄件(castings),每個內含56個換能器(transducers),因此整個聲納陣列有1176個換能器(以84×4排列),並透過壓力艙壁(pressure hull)連接至聲納機櫃空間(Sonar Cabinet Space)。這些連接通道與備品區域被稱為「甘藍園(Cabbage Patch)」,每艘潛艦上共設 22組60路(60 Way)殼體導管(hull glands)。在英國第二代核子動力攻擊勇士級(Valiant Class)潛艦中,此區域位於距艏陣列後方約 80英尺處、艦員餐廳(wardroom)上方;而在決心級彈道飛彈潛艦(Resolution class)中,則位於聲納機櫃空間之上。 2001型聲納能形成24個主動搜索波束,主動模式的工作頻段是2.95KHz~3.8KHz;被動工作模式則有低頻(LF,1.5KHz~2.6KHz) 與高頻(HF,5.5KHz~6.5KHz)。 2.後端機櫃 2001聲納系統名義上總共有27個聲納電子機櫃(Cabinets),但實際上只有26組;第25號機櫃原本應包含高頻與低頻筆式記錄器(HF & LF Pen Recorders),但後來被整合進第27號機櫃中,所以實際上最後就沒有25號機櫃。 其中,六組機櫃控制 10 種主動傳輸模式(transmission modes)。聲納機櫃空間(Sonar Cabinet Space)裝置24組機櫃,包括:發射/接收切換器(Transmit/Receive Switches)、發射功率放大器(Transmitter Power Amplifiers)、水平/垂直延遲線單元(Lag Line Units)、PPI接收器、扇區接收器(Sector receivers)、緩衝放大器(Buffer Amplifiers)、自都卜勒抑制器(Own Doppler Nullifiers)、穩定切換器(Stabilising Switches)與掃描切換器(Scanning Switches)。在勇士級與邱吉爾級(Churchill Class)核子動力攻擊潛艦上,聲納機櫃空間位於第3 甲板。 在聲音室(Sound Room)內的第27號機櫃(Cabinet 27) 包含主要的功能切換器(Main Function Switch)、序列計時器(Sequence Timer),以及四種顯示與記錄設備: 1.初始偵測顯示器(Initial Detection Display, IDD) 2.扇區顯示器(Sector Display): 3.高頻(HF)筆式記錄器(Pen Recorders) 4.低頻(LF)筆式記錄器 此外,控制室(Control Room)內還設有一具平面位置指示(Plan Position Indicator,PPI)顯示器。
2001聲納系統以機械式的「序列計時器」(Sequence
Timer)與「功能切換器」(Function
Switch)來一同同控制各種主動傳輸模式;由於1950年代末與1960年代的電子技術仍無法實現所需的精準控制,因此只能以機械複合方式來實現。這些設備 3.顯控裝備 1.初始偵測顯示器( IDD):為了記錄聲納探測的結果,2001聲納的初始偵測顯示器(IDD) 搭配兩部攝影顯示單元(Photographic Display Units, PDU)。PDU是由 皇家空軍(RAF)用於偵察機的設備大幅修改而來。原本皇家空軍的攝影裝置使用總長1000英尺的35毫米黑白膠捲(35-mm black & white film),在飛行期間持續拍攝影像,返航後卸下底片在基地裡沖洗。而2001聲納系統的PDU同樣使用總長1000英尺的35mm 底片,主要工作是在每一個聲納發射序列(Transmission Sequence,長9.1秒)結束後拍攝顯示於陰極射線管(CRT) 螢幕顯示的回波影像;接著,在下一個發射序列開始時,剛拍攝出來、前一個發射序列的影像會被「轉運」(snatched)到顯影槽(processing pot)中進行顯影(developed)、定影(fixed)、清洗(washed)與烘乾(dried)等處理。等到新的發射序列結束時,這張底片就會被傳送至投影鏡頭(Projector Lens),再經由一組反射鏡系統反向投影(back-projection)至 IDD 螢幕上(同時下一個發射序列拍攝的底片也正在被處理)。換言之,IDD操作員所看到的畫面,實際上永遠是兩個發射序列之前的影像;在在8萬碼探測距離設定下,這樣的延遲就會顯得相當顯著。使用兩部PDU的原因是其中一部停機維修或發生故障時,仍有另一部能維持運作;PDU同時結合了電子、氣動(pneumatics)、攝影、化學藥液、高壓電與光學元件,結構極為複雜且非常不穩定(very temperamental),例如經常發生底片斷裂或化學藥液耗盡等問題。當主PDU 發生故障或停機維修時,操作員就切換到備用PDU,此時一面反射鏡會旋轉90度,將光線轉到另一部PDU上。在理想狀況下,PDU切萬之後 投影出的影像都能與先前畫面精確對齊。 2.扇區顯示器(Sector Display):具備主動模式(Active Mode)與被動模式(Passive Mode)兩種運作方式。在主動模式下,操作員可依據 IDD螢幕上顯示的可疑接觸(contact)位置,選擇其大致距離與方位。在下一個聲納發射序列中,系統會在所選方位上發出一次頻寬512 毫秒的調頻(FM)聲脈衝;在隨後的接收階段(receive period),扇區操作員會監聽預期距離與方向上的回波,以獲得更精確的距離與方位資料供火控系統(Fire Control)使用。 在被動模式下,值勤的聲納士官(UC)會操作扇區顯示器,在前方240度弧形區域內掃描,根據 高頻(HF)與低頻(LF)筆式記錄器上的訊號,辨識與分類可疑聲源(contacts of interest)。
此外,操作員還可切換至艦尾方向(stern arcs),利用艦尾掃描器(stern
scanner)監聽、分析後方的聲音信號。 2001型聲納的測試工作首先是在一艘二次大戰時代的V級驅逐艦維魯拉姆(HMS Verulum R28)進行的;該艦在1958至1961年作為海軍部水面武器部門( Admiralty Surface Weapons Establishment,ASWE)的裝備測試艦。由於維魯拉姆的艦體太小,無法安裝完整的2001聲納系統,因此僅裝設了一半的聲納設備;艦首增設一個巨大的外罩(dome)來收容2001型聲納的陣列,使艦體吃水加深11英尺。這個巨大聲納罩影響了該艦的耐海性能:當航速超過8節時,艦首波會覆蓋艙罩並激起大量含氣水,導致自噪聲顯著增加,限制了聲納試驗條件。維魯拉姆搭載實驗的2001型聲納在多個海域進行實驗,測試工作一直持續到1962年。在地中海進行的少數幾次與核潛艦對抗的試驗中,該聲納在被動模式下,在200英里距離外成功偵測到高速航行中的美國海軍鸚鵡螺號(USS Nautilus SSN-571)核子動力潛艦。 在北海進行的其他試驗中,2001型聲納也曾在主動模式下,在34000碼(約31km)距離上探測到小鯨級(Porpoise class)柴電潛艦抹香鯨號(HMS Cachalot S06);小鯨級是二次大戰以後設計建造、同時期最安靜的柴電潛艦之一。 此外,試驗團隊還曾進行「海底反射」 (bottom bounce);這主要是因為安裝在艦首下方,陣列的角度允許波束朝下發射;但實際安裝在潛艦(無畏號攻擊核潛艦以及決心級戰略核潛艦)是安裝在艦首向上觀測配置 (upward-looking position),無法進行海底反射操作。 在1961年,維魯拉姆被轉調到駐防在波特蘭(Portland)的第二巡防艦隊(2nd Frigate Squadron)擔任其他任務;而接替聲納測試任務的是一艘二次大戰的戰鬥級(Battle class)驅逐艦馬坦帕號(HMS Matapan D43)。為了進行水聲設備測試任務,馬坦帕號經過特別改裝,增加了額外的艙室、專為測試用聲納供電的發電機以及專屬煙囪,並具備供直升機起降的能力。
2001型聲納的所有研發與試驗活動都引來蘇聯的高度注意,例如「波特蘭間諜網 」(Portland Spy
Ring)事件就包括洩漏英國聲納的信息;該間諜網因為一名位於波蘭情報單位的CIA特工麥可.格林埃斯基(Michael Goleniewski,代號
SNIPER)提供的情報而破獲。「波蘭間諜網」由前皇家海軍執法軍士 (ex-Master at Arms)哈利.休士頓(Harry
Houghton)及其情婦伊索.吉(Ethel Gee)組成,兩人皆在英國水下武器研究局 (AUWE)
工作,並竊取最高機密的技術文件送往海外,其中最具價值的就是數位多波束聲納(DIMUS)技術;這些從AUWE竊取的文件被交給蘇聯間諜 Gordon
Lonsdale(偽裝為加拿大商人),他再將文件送往一對經營古籍書店的彼得.克羅根(Peter Kroger)與海倫.克羅根(Helen
Kroger)夫婦,兩人將文件藏於書籍中秘密運往海外。在審訊過程中得知,所謂的「克羅根夫婦」實際上是美國的知名間諜莫里斯與(Morris)和羅娜.可汗(Lona
Cohen)。
在贏得合約後,普萊西在薩墨賽特郡(Somerset)的坦普爾庫姆(Templecombe)設置新廠房來生產2001型聲納,選擇坦普爾庫姆是因為當地有鐵路東西線(east-west)車站,當時規劃的南北線(north-south)鐵路也會通過坦普爾庫姆,交通便利。不幸的是,坦普爾庫姆的普萊西新廠完工不久,Beeching博士
(Dr. Beeching) 的鐵路改革計畫便取消了南北線。結果,普萊西為勇士級、秋吉爾級、決心級與快捷級(Swiftsure
Class)生產的2001聲納系列,都在位於倫敦東部的伊爾福德(Ilford)的廠區完成。 而隨後建造的邱吉爾級攻擊核子潛艦與決心級戰略核子潛艦的2001型聲納則為正式量產版本,勇士號與厭戰上日後在翻修(re-fit)作業時也返裝(back-fitted)了量產型2001聲納。定型的2001型聲納在1966年形成初始作戰能力(IOC)。 技術演進 最初2001 X1原型聲納在無畏號上出海測試時,艦首共形艏部陣列 (conformal array)外部並沒有安裝圓型外罩(dome),主要顧慮是外罩多少會造成聲納波的方位誤差,影響射控解算。當時英國僅在一艘柴電潛艦上測試艦首聲納罩。同時期美國海軍潛艦使用鋼製聲納外罩,導致聲納的發射源級(transmission source level)大幅衰減。 直到1970年,新的玻璃纖維外罩通過聲學透明度(transparency)試驗後,才裝備於潛艦上;然而,此種新外罩又引入了所謂的「輻條」(spokes」問題(即聲納波束出現輻射條紋現象)。由於2001型聲納當時尚未列為正式服役的裝備,因此能即時採取一項稱為Palliative的改進措施來校正(normalised)「輻條效應」。直到1976年,皇家海軍在玻璃纖維聲納罩表面塗上Rho/C聚氨酯 (polyurethane)之後,才徹底根除輻條效應。
在英國最初三艘核動力攻擊潛艇(無畏號、勇士號、厭戰號)服役初期,指揮官們經常以主動模式使用2001型聲納。 改進型:2001 BC(快捷級核子及潛艦) 在1970年代服役的快捷級(Swiftsure class)核子攻擊潛艦使用改良後的2001 BC型,最顯著的改進是將聲納陣列移至艏部中心線下方(chinstrap)位置,不僅改善波束向下角度、能以海底反射模式操作,也改善先前首上陣列容易接收到海面反射來的自噪或環境雜訊的問題。
快捷級核子動力攻擊潛艦快捷號(HMS Swiftsure S126)在l羅賽斯船廠 拆解的畫面,攝於2025年,此時該艦早已完成反應器移除工程。注意艦首2001/ 2020聲納陣列設置在艦首下方(此時已經被封住),可以降低獲得較好的聲納俯視 角度來使用海底反射模式,並減低從水面反射來的環境自噪干擾;而魚雷管也 配合移到兩側。
此外,2001 BC的組件與次系統也進行了許多升級,例如原本的鍺晶體電晶體(germanium transistors)全面改為矽晶體(silicon)電晶體組件;改用數位控制結合類比電路(digital controls mixed up with analogue electronics)控制伺服系統(server controls);將聲納發射系統的「漣波效應馬達」(ripple effect motor)數位化;新增了 2018型DEMON分析儀,以感電(electrical sensitive)的Teledeltos紙與電火筆(sparky pens)記錄目標信號頻譜。 然而,改用這些靈敏的分析裝置後,2001聲納另一問題卻因而浮現;其內部電子噪聲過高,掩蓋了對外部潛艦或水面艦的真實目標信號。因此,接下來的五年間,工程團隊持續致力於降低系統內部雜訊,以恢復其在反潛作戰中的高靈敏度與效能。
快捷級首艦快捷號(HMS Swiftsure S126)在1973年服役,而下一代艦首聲納陣列系統——2020型(Sonar
2020)的設計工作可能在此前已經展開。不過在2020型聲納實現前,海軍部水下武器發展部門(AWE)與普萊西公司伊爾福德廠仍針對現役2001型聲納進行「第三階段」(Phase
3)改進;在此階段中,系統中的多個機電式元件序列控制單元被數位式序列控制單元(digital sequencer
unit)取代,使聲納的可靠度、穩定性與維修性大幅提升。這些改進被回溯安裝到勇士級、邱吉爾級、決心級以及快捷級等使用2001聲納的核子潛艦上。此外,原本IDD中複雜又易損壞的攝影顯示單元(PDU)也被淘汰,IDD的輸出資料直接整合到新的電子顯示系統中,再也不需要依靠底片拍攝的PDU。
原本2001型艦首適形陣列上大部分是主動模式的換能器(transducers),而2020型大多數單元則是被動式水聽器(passive
hydrophones),只保留較少數用於主動模式的換能器;這充分反應皇家海軍已經對齊「隱蔽、潛聽、低可探測性」的現代化反潛作戰思維,主要以被動模式截收與分析水聲信號,盡量避免使用主動聲納暴露本身位置。
|
